/*
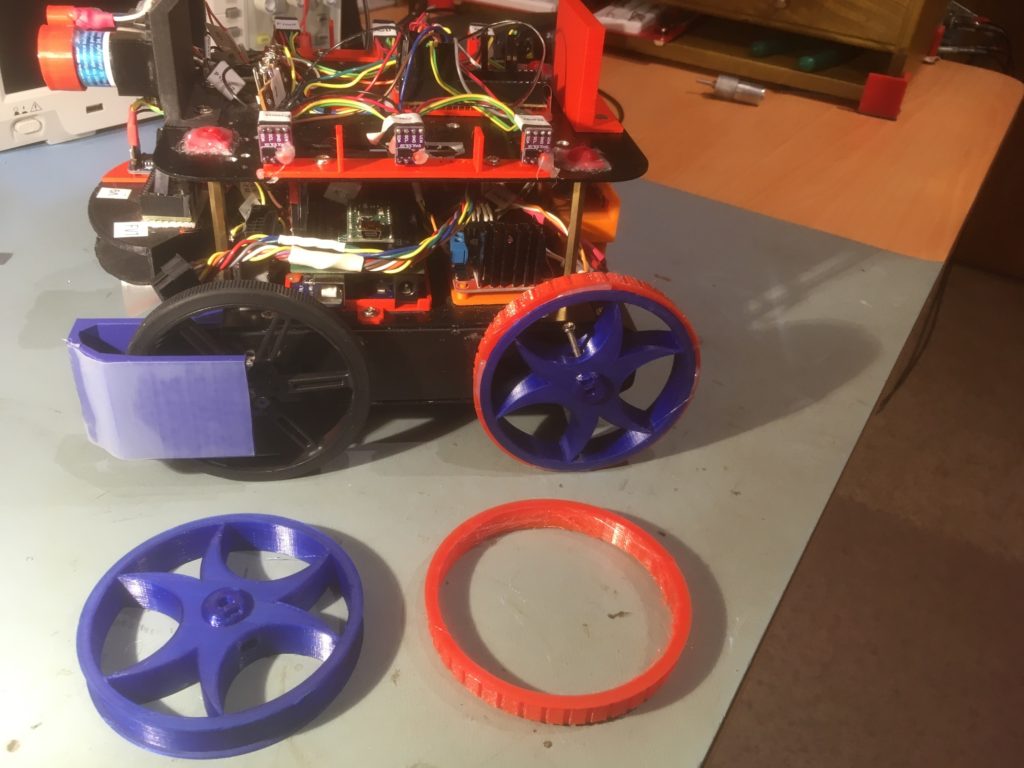
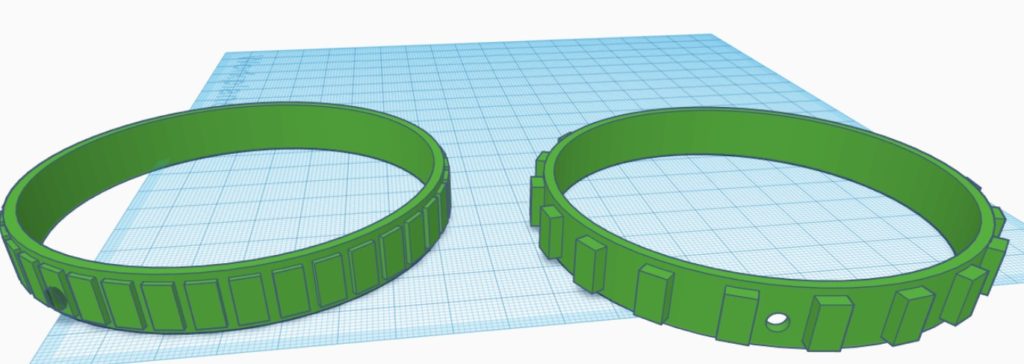
The wheel is defined as having a hub, a rim, and a tire. Wheel dimensions are overall diameter
and width, i.e. a 100mm x 30mm wheel will be a cylindrical shape with an overall diameter of 100mm
and a height (width) of 30mm. The rim will be a hollow cylinder with ID = overall diam - tire
thickness - rim thickness, and OD = ID + rim thickness. The cylindrical area between the center of
the wheel and the ID of the rim may be solid or spoked, and there may or may not be a hub.
*/
$fn=150;
wheelDiameter = 90; //overall diameter of the wheel, including rim & tire
wheelWidth = 15; //overall width (height) of the wheel, including guardrails
rimThickness = 5; //rim thickness (part of overall tire diameter)
tireThickness = 5; //tire thickness (part of overall tire diameter)
guardrailThickness = 2; //doesn't add to overall tire diameter
guardrailWidth = 1; //included in overall tire width
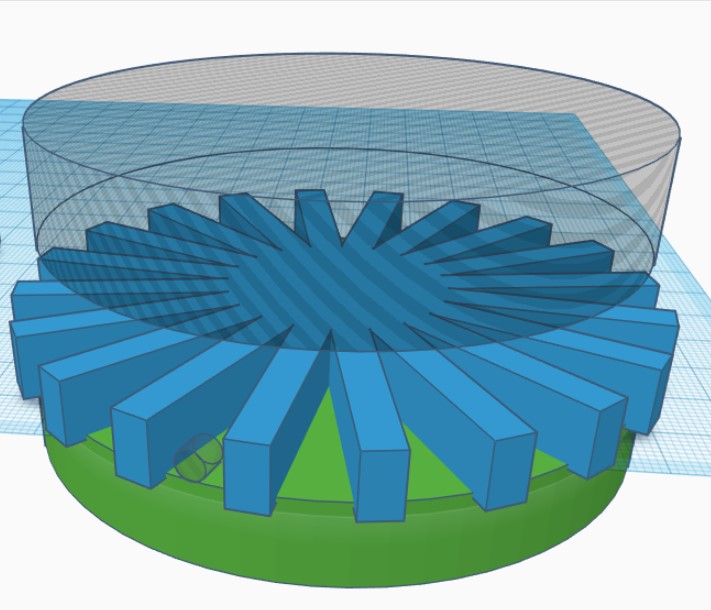
spokeThickness = 9;
numberOfSpokes = 3;
spokeEccentricity = 1.5; //how elliptical do the spokes look
//derived values
wheelMinusRimDiameter = wheelDiameter - rimThickness;
rimOD = wheelDiameter - tireThickness;
rimID = rimOD - rimThickness;
// The hub
includeHub = true; // Set to false to remove the hub and only include the shaft diameter hole.
hubDiameter = 15; // The diameter of the hub portion of the wheel
hubHeight = 18; // The total height of the hub
hubZOffset = -wheelWidth/2; // The Z position of the hub, negative numbers from the surface of the wheel
innerCircleDiameter = 0; // The diameter of the solid inner circle under the hub, or zero for none.
baseFilletRadius = 2; // The radius of the fillet (rounded part) between the hub and wheel.
topFilletRadius = 2; // The radius of the fillet (rounded part) at the top of the hub.
chamferOnly = false; // Set to true to use chamfers (straight 45-degree angles) instead of fillets.
concavity = [0,0];
//hardware
shaftDiameter = 4.5; // The diameter of the motor shaft
shaftFlatDiameter = 3.5 ; // The diameter of the motor shaft at the flat, or shaftDiameter for no flat.
setScrewCount = 1; // The number of set screws/nuts to render, spaced evenly around the shaft
setScrewDiameter = 3; // The diameter of the set screw. 3 is the default for an M3 screw.
setScrewTrap = [5.4, 2.3]; // Size [indiameter, thickness] of set screw nut. The depth is set automatically.
setScrewNutDiameter = 5.4; // The "diameter" of the captive nut, from flat to flat (the "in-diameter")
setScrewNutThickness = 2.3; // The thickness of the captive nut
setScrewNutOffset = 0; // The distance to offset the nut from the center of the material. -/+ = in/out
servoHoleDiameter = 0; // The diameter of servo arm hounting holes, or zero if no holes
servoHoleDistance1 = 25; // Distance across servo horn from hole to hole (0 to ignore)
servoHoleDistance2 = 21; // Distance across servo horn from hole to hole, rotated 90 degrees (0 to ignore)
servoArmRotation = 45; // The total rotation of all servo holes
servoNutTrap = [4,1.6]; // Size [indiameter, depth] of servo arm captive nut, or 0 (any) for none.
outerNutTrap = [12.5,0]; // Size [indiameter, depth] of a captive nut, or 0 (any) for none.
wheel_with_tire();
if ( includeHub )
{
translate([0,0, hubHeight/2 + wheelWidth/2 + hubZOffset - concavity[0]])
hub(hubHeight, hubDiameter, shaftDiameter, shaftFlatDiameter,
setScrewCount, setScrewTrap, setScrewDiameter, setScrewNutOffset,
hubZOffset, baseFilletRadius, topFilletRadius, chamferOnly);
}
/////////////////////////////////////////////////////////////////////////////
// Modules...
/////////////////////////////////////////////////////////////////////////////
// The hub (the part that holds the wheel onto the motor
module hub( height, diameter, shaftDiameter, shaftFlatDiameter, nuts, nutSize, setScrewDiameter,
setScrewNutOffset=0, hubZOffset=0, baseFilletRadius=0, topFilletRadius=0, chamferOnly=false) {
hubWidth=(diameter-shaftDiameter)/2;
union() {
difference() {
// Main hub shape
union() {
difference() {
union() {
cylinder( h=height, r=diameter/2, center=true );
// First chamfer the base...
translate([0,0,hubZOffset])
rotate_extrude()
translate([diameter/2,-(height/2)-hubZOffset,0])
polygon(points=[[0,0],[0,baseFilletRadius],[baseFilletRadius,0]]);
}
// Chamfer the top...
rotate_extrude()
translate([diameter/2,height/2,0])
polygon(points=[[0.5,0.5],[-topFilletRadius-0.5,0.5],[0.5, -topFilletRadius-0.5]]);
// Carve the bottom fillet from the chamfer
if ( !chamferOnly ) {
translate([0,0,hubZOffset])
rotate_extrude() {
translate([(diameter/2)+baseFilletRadius,
-(height-(2*baseFilletRadius))/2-hubZOffset,0]) {
circle(r=baseFilletRadius);
}
}
}
}
// Add the fillet back on top of the top chamfer
if (!chamferOnly) {
rotate_extrude() {
translate([
(diameter/2)-topFilletRadius,
(height-(2*topFilletRadius))/2,
0])
circle(r=topFilletRadius);
}
}
}
// Remove the bore
echo(str("shaftDiameter = ", shaftDiameter));
difference()
{
cylinder( h=height+1, r=shaftDiameter/2, center=true );
translate([(shaftDiameter-shaftFlatDiameter+1)/2 + (shaftDiameter/2)
- (shaftDiameter - shaftFlatDiameter),0,0])
cube( [shaftDiameter-shaftFlatDiameter+1,shaftDiameter,height+2], center=true );
}
// Remove the captive nut
//08/22/20 gfp bugfix: chg translate() z param to zero so it follows hub offsets
//08/22/20 gfp bugfix: repl 'boreDiameter' with 'shaftDiameter' to reduce confusion
for( i=[0:nuts-1] )
{
rotate([ 0,0, (360/nuts)*i ])
translate([shaftDiameter/2+(diameter-shaftDiameter)/4 +setScrewNutOffset,
0, 0])
{
rotate([0,-90,0])
{
captiveNut( nutSize, setScrewDiameter,
depth=height/2+1, holeLengthTop=hubWidth/2+setScrewNutOffset
+(shaftDiameter-shaftFlatDiameter),
holeLengthBottom=hubWidth+baseFilletRadius-setScrewNutOffset);
}
}
}
}
}
}
module wheel_with_tire()
{
difference()
{
union()
{
cylinder(wheelWidth, rimOD/2, rimOD/2, $fn=150);
cylinder(guardrailWidth,
guardrailThickness + rimOD/2,
guardrailThickness + rimOD/2,
$fn=150);
translate(v=[0,0,wheelWidth-guardrailWidth])
{
cylinder(guardrailWidth,
guardrailThickness + rimOD/2,
guardrailThickness + rimOD/2,
$fn=150);
}
}
translate(v=[0,0,-2])
{
cylinder(wheelWidth+4, rimID/2, rimID/2, $fn=150);
}
//08/22/20 remove setscrew access hole
//extend the hub shaft capture screw hole out past rim, so that
//it will pierce the rim if the hub sits low enough on the rim
if ( includeHub )
{
nutSize=setScrewTrap;
translate([0,0, hubHeight/2 + wheelWidth/2 + hubZOffset])
hubHoleCutout(hubHeight, hubDiameter, shaftDiameter, shaftFlatDiameter,
setScrewCount, setScrewTrap, setScrewDiameter, setScrewNutOffset,
hubZOffset, baseFilletRadius, topFilletRadius, chamferOnly);
}
}
if(numberOfSpokes > 0)
{
difference()
{
for (step = [0:numberOfSpokes-1])
{
rotate( [0, 0, step*(360/numberOfSpokes)] )
ellipticalSpoke(wheelWidth, wheelMinusRimDiameter, spokeEccentricity);
}
// Remove the motor shaft and setscrew nut trap cutouts if necessary
if(includeHub)
{
union()
{
//flatted motor shaft cutout
difference()
{
cylinder( h=(wheelWidth+hubHeight) + 2, r=shaftDiameter/2, center=true );
translate([(shaftDiameter-shaftFlatDiameter+1)/2 + (shaftDiameter/2)
- (shaftDiameter - shaftFlatDiameter),0,0])
cube( [shaftDiameter-shaftFlatDiameter+1,shaftDiameter,10*hubHeight+2], center=true );
}
//setscrew nut trap cutout
//08/22/20 gfp bugfix: chg translate() z param to zero so it follows hub offsets
//08/22/20 gfp bugfix: repl 'boreDiameter' with 'shaftDiameter' to reduce confusion
// for( i=[0:nuts-1] )
{
hubWidth=(hubDiameter-shaftDiameter)/2;
// rotate([ 0,0, (360/nuts)*i ])
// translate([shaftDiameter/2+(hubDiameter-shaftDiameter)/4 +setScrewNutOffset,
// 0, 0])
translate([shaftDiameter/2+(hubDiameter-shaftDiameter)/4 +setScrewNutOffset,0, hubHeight/2 + wheelWidth/2 + hubZOffset])
{
rotate([0,-90,0])
{
echo(str("captiveNut(",
setScrewTrap,
",",setScrewDiameter,
",",hubHeight/2+1,
",",hubWidth/2+setScrewNutOffset
+(shaftDiameter-shaftFlatDiameter),
",",hubWidth+baseFilletRadius-setScrewNutOffset,") call in spoke"));
captiveNut( setScrewTrap, setScrewDiameter,
depth=hubHeight/2+1, holeLengthTop=hubWidth/2+setScrewNutOffset
+(shaftDiameter-shaftFlatDiameter),
holeLengthBottom=hubWidth+baseFilletRadius-setScrewNutOffset);
}
}
}
}
}
//08/22/20 remove setscrew access hole
//extend the hub shaft capture screw hole out past rim, so that
//it will pierce the rim if the hub sits low enough on the rim
if ( includeHub )
{
hubWidth=(wheelDiameter-shaftDiameter)/2;
nutSize=setScrewTrap;
translate([0,0, hubHeight/2 + wheelWidth/2 + hubZOffset])
hubHoleCutout(hubHeight, hubDiameter, shaftDiameter, shaftFlatDiameter,
setScrewCount, setScrewTrap, setScrewDiameter, setScrewNutOffset,
hubZOffset, baseFilletRadius, topFilletRadius, chamferOnly);
}
}
}
}
module hubHoleCutout( height, diameter, boreDiameter, shaftFlatDiameter, nuts, nutSize, setScrewDiameter,
setScrewNutOffset=0, hubZOffset=0, baseFilletRadius=0, topFilletRadius=0, chamferOnly=false)
{
hubWidth=(diameter-boreDiameter)/2;
union()
{
// Remove the captive nut
for( i=[0:nuts-1] )
{
rotate([ 0,0, (360/nuts)*i ])
// translate([boreDiameter/2+(diameter-boreDiameter)/4 +setScrewNutOffset,
// 0, height/2 - (height+hubZOffset)/2])
translate([boreDiameter/2+(diameter-boreDiameter)/4 +setScrewNutOffset,
0,0])
{
rotate([0,-90,0])
{
echo(str("before call to captiveNutHoleExtension(",nutSize, ", ",setScrewDiameter, ", ",depth=height/2+1, ", ",hubWidth/2+setScrewNutOffset
+(boreDiameter-shaftFlatDiameter), ", ",hubWidth+baseFilletRadius-setScrewNutOffset));
//* captiveNut( nutSize, setScrewDiameter,
// depth=height/2+1, holeLengthTop=hubWidth/2+setScrewNutOffset
// +(boreDiameter-shaftFlatDiameter),
// holeLengthBottom=hubWidth+baseFilletRadius-setScrewNutOffset);
captiveNutHoleExtension( nutSize, setScrewDiameter,
depth=height/2+1, holeLengthTop=hubWidth/2+setScrewNutOffset
+(boreDiameter-shaftFlatDiameter),
holeLengthBottom=hubWidth+baseFilletRadius-setScrewNutOffset);
}
}
}
// }
}
}
module ellipticalSpoke(width, diameter, eccentricity)
{
translate([0,0,width/2])
intersection()
{
cylinder(h=width, r=wheelMinusRimDiameter/2, center = true);
translate([spokeEccentricity*wheelMinusRimDiameter/4, 0, 0])
scale([spokeEccentricity,1,1])
{
difference()
{
cylinder(h = width, r = wheelMinusRimDiameter/4, center = true);
//translation and width addition to make sure of good punch-out
translate([spokeThickness,0,0])
cylinder(h = width+4, r = wheelMinusRimDiameter/4, center = true);
}
}
}
}
//circleSpokes( d, wheelWidth, spokeThickness, proportion, numberOfSpokes );
//
//// Circles pattern spokes
//module circleSpokes( wheelDiameter, wheelWidth, spokeThickness, proportion, numberofSpokes ) {
// echo( "Circles Style..." );
// intersection() {
//# cylinder( h=wheelWidth, r=wheelDiameter/2, center = true );
//
// for (step = [0:numberofSpokes-1]) {
// rotate( [0, 0, step*(360/numberofSpokes)] )
// circleSpoke( wheelDiameter, wheelWidth, spokeThickness, proportion );
// }
// }
//
//}
//module circleSpoke( wheelDiameter, wheelWidth, spokeThickness, proportion ) {
//// render()
// echo(str("spokeThickness = ",spokeThickness));
// let( ox=(wheelDiameter/2)*proportion[0], oy=(wheelDiameter/2)*proportion[1] )
// let( ix=ox-(spokeThickness*2), iy=oy-(spokeThickness*2) )
// {
// translate ( [-ox/2, 0, 0] )
// {
// difference()
// {
// scale([proportion[0],proportion[1],1])
//# cylinder( r=wheelDiameter/4, h=wheelWidth, center=true);
// scale([(ix/ox)*proportion[0],(iy/oy)*proportion[1],1])
// cylinder( r=wheelDiameter/5, h=wheelWidth +1, center=true);
// }
// }
// }
//}
// This is the captive nut module I use in several of my designs.
module captiveNut( nutSize, setScrewHoleDiameter=3,
depth=10, holeLengthTop=5, holeLengthBottom=5 )
{
render()
union() {
nut( nutSize );
if ( depth > 0 )
translate([depth/2,0,0])
cube( [depth, nutSize[0], nutSize[1]], center=true );
translate([0,0,-(nutSize[1]/2)-holeLengthBottom])
cylinder(r=setScrewHoleDiameter/2, h=nutSize[1]+holeLengthTop+holeLengthBottom, $fn=15);
}
}
// nutSize = [inDiameter,thickness]
module nut( nutSize ) {
side = nutSize[0] * tan( 180/6 );
if ( nutSize[0] * nutSize[1] != 0 ) {
for ( i = [0 : 2] ) {
rotate( i*120, [0, 0, 1])
cube( [side, nutSize[0], nutSize[1]], center=true );
}
}
}
// This extends the captive nut hole so through the wheel rim for tool access
module captiveNutHoleExtension( nutSize, setScrewHoleDiameter=3,
depth=10, holeLengthTop=5, holeLengthBottom=5 )
{
translate([0,0,-wheelDiameter/2])
cylinder(r=1+setScrewDiameter/2, h=wheelDiameter/2, $fn=15);
}