Posted 06/28/16
In my last post on this subject, I used my new Magnetometer to generate calibration matrix/center offset values for my Mongoose IMU (which uses a HMC5883 3-axis magnetometer), in a ‘free space’ (no nearby magnetic interferers) environment, and showed that I could incorporate these values into the Mongoose’s firmware. In this post, I describe my efforts to calibrate the same Mongoose IMU, but now mounted on Wall-E2, my 4WD wall-following robot.
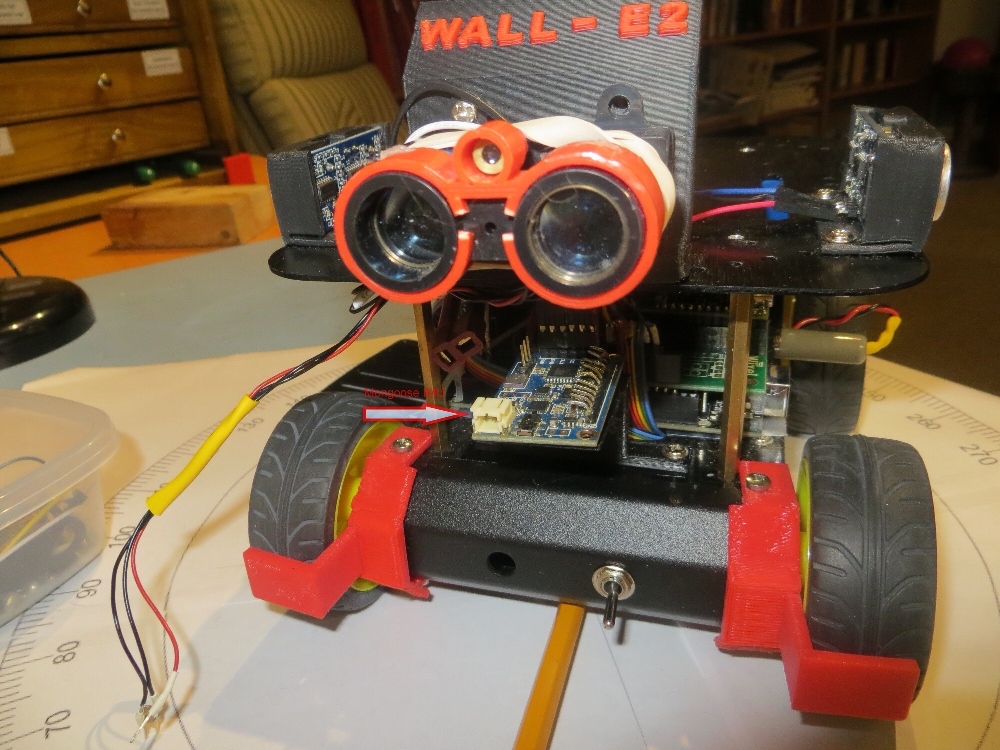
Mongoose IMU (see arrow) mounted on front of Wall-E2
A long time ago, in a galaxy far, far away (actually 3 months ago, in the exact same galaxy), I had the Mongoose IMU mounted on the front of my robot, as shown in the above image. Unfortunately, when I tried to use the heading data from the Mongoose (see Giving Wall-E2 a Sense of Direction, Part IV), it was readily apparent that something was badly wrong. Eventually I figured out that the problem was the magnetic fields associated with the drive motors that were causing the problem, and I wouldn’t be able to do much about that without some sort of calibration exercise. After this realization I tried, unsuccessfully, to find a magnetometer calibration tool that I liked. Failing that, I wrote my own (twice!), winding up with the WPF-based application described in ‘Magnetometer Calibration, Part III‘.
So, now the idea is to re-mount the Mongoose IMU on Wall-E2, and use my newly-created calibration tool to compensate for the magnetic interference generated by the DC motors and operating currents. As a first step in that direction, I decided to mount the IMU on a wooden stalk on the top of the robot, thereby gaining as much separation from the motors and other interferers as possible. If this works, then I will try to reduce the height of the stalk as much as possible.
The image below shows the initial mounting setup.
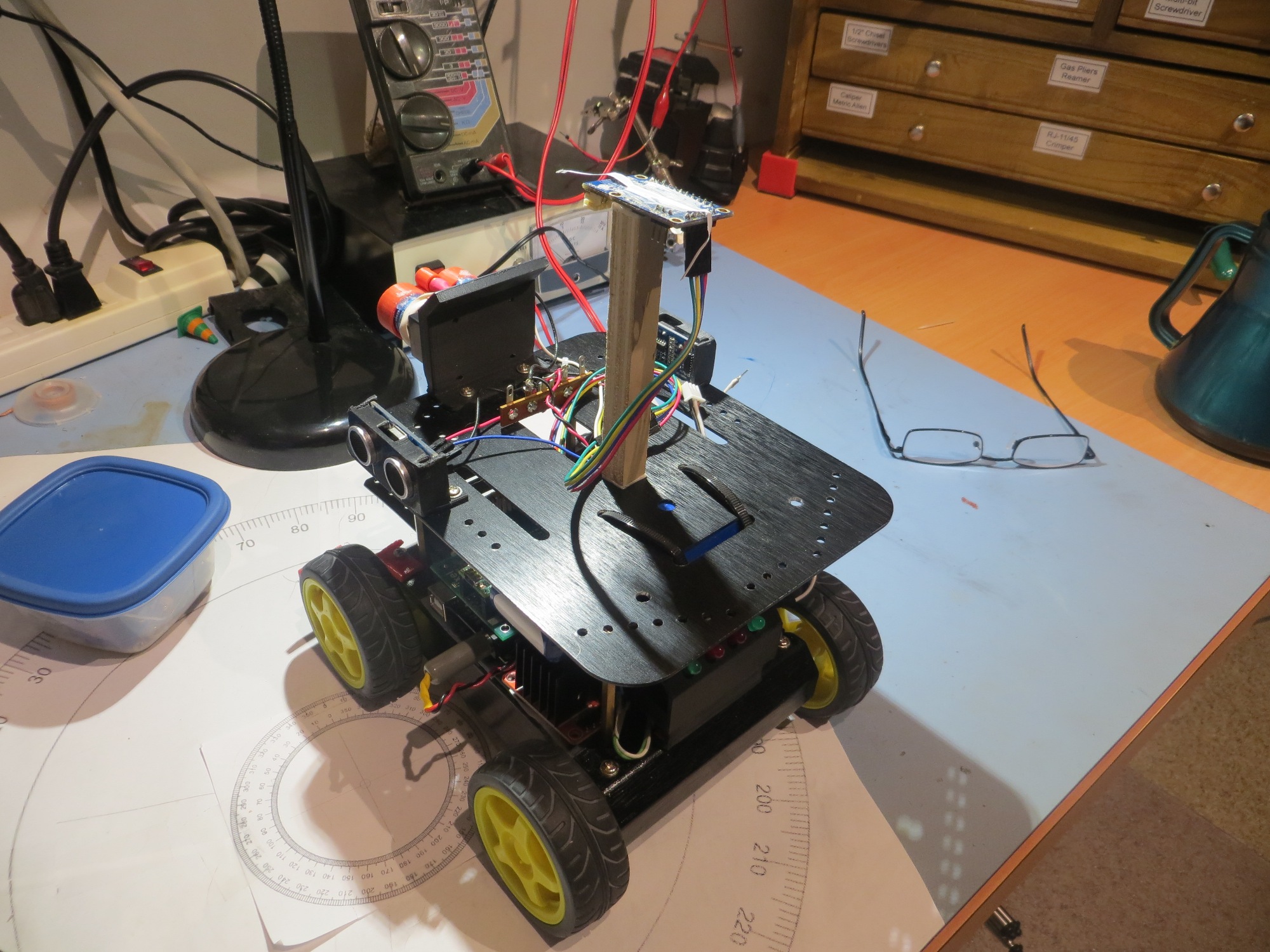
Mongoose IMU mounted on wood stalk
With the Mongoose mounted as shown, I used my magnetometer calibration tool to generate a calibration matrix and center offset, as shown in the following image.
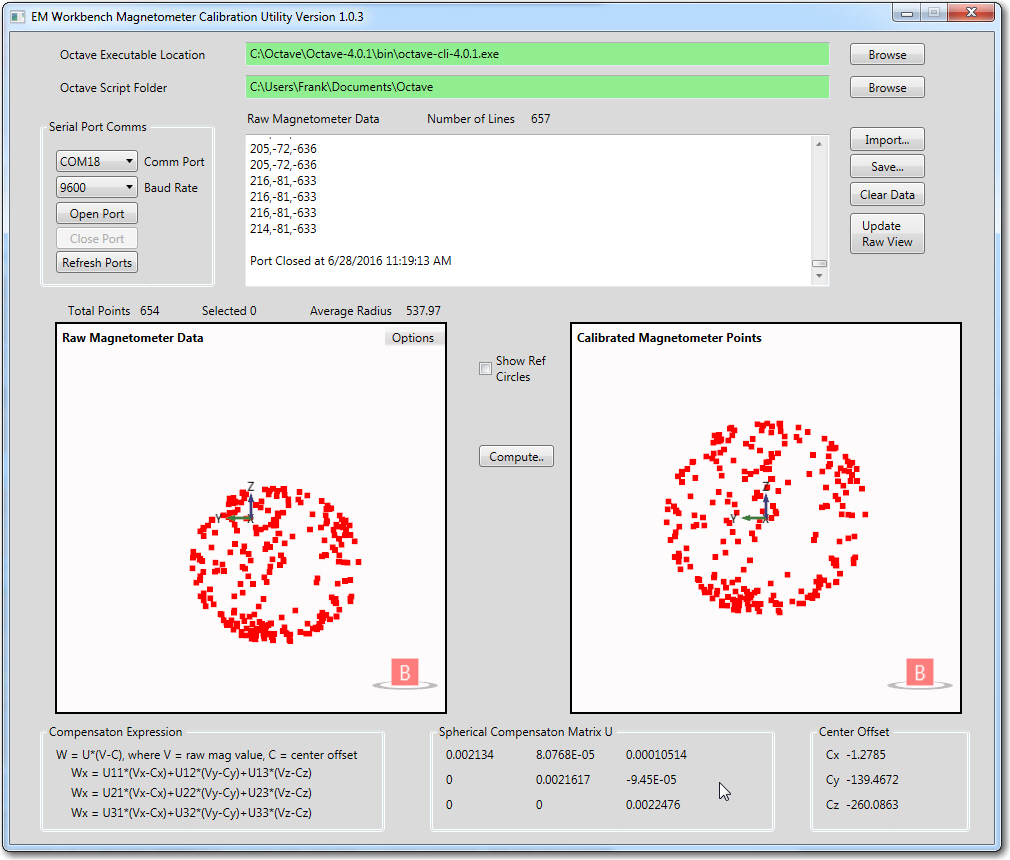
Calibration run for Mongoose IMU mounted on wood stalk on top of Wall-E2