Posted 20 September 2023
Last February I changed out the Pulsed Light ‘Blue Label’ LIDAR system on WallE3 for the newer and better Garmin LIDAR-Lite V4 LED time-of-flight distance sensor (see this post and this post), and it has been working very well for me since then. However, I recently had occasion to re-visit my ‘MoveToDesiredForwardDistance()’ function, and found that WallE3 wasn’t doing a very good job of stopping where it should; it was often stopping 8-10cm farther away from the wall than desired.
Going back through the above two posts from last February, I found that this was something I had noticed at the time, but hadn’t worried about as precise front distances are generally not needed. However, precise front distances are required for the ‘MoveToDesiredForwardDistance()’ operation, so it is time to think about distance compensation, at least for distances less than 1m.
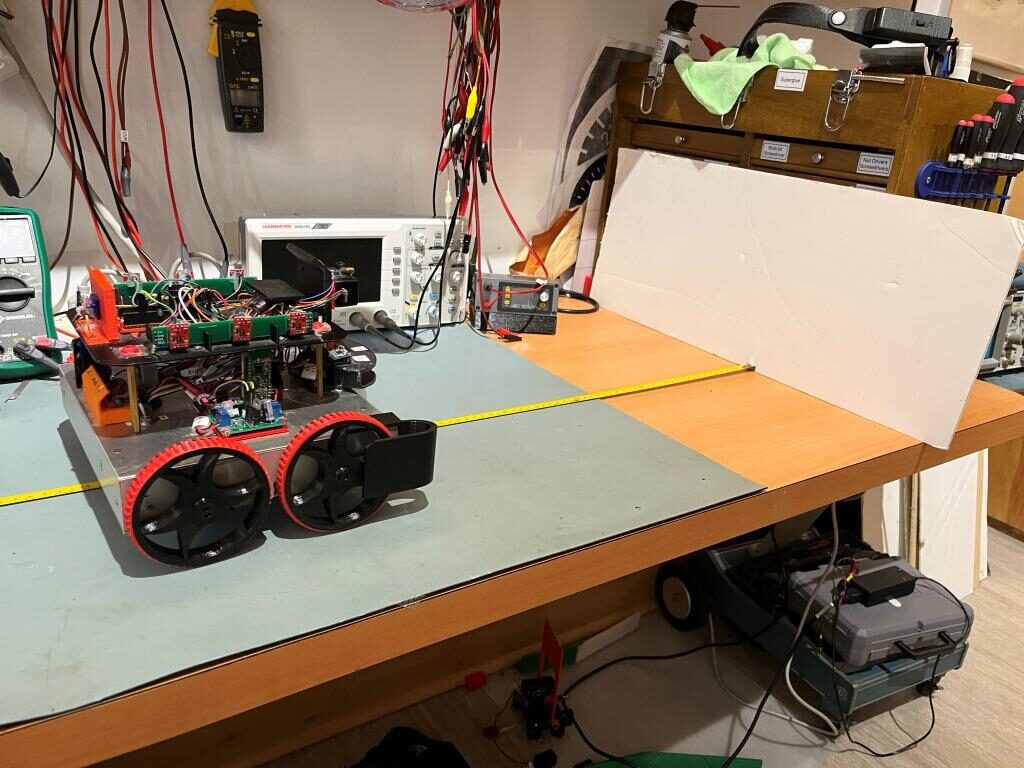
I started by redoing the distance measurement experiment shown in my initial study, as shown in the photo below:
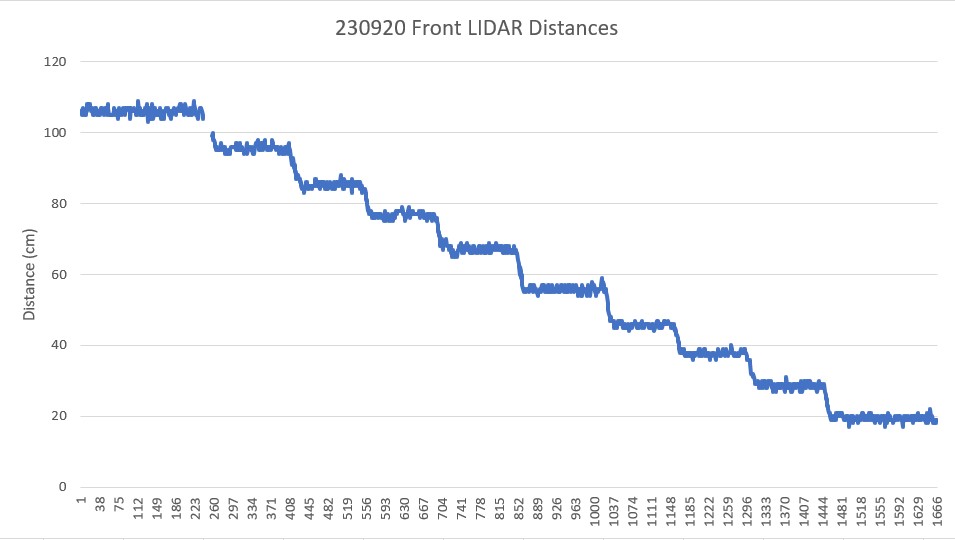
This produced the following plot:
Then I took the average from each of the above ‘stairsteps’ and plotted that against the actual distances, arriving at the following plot:
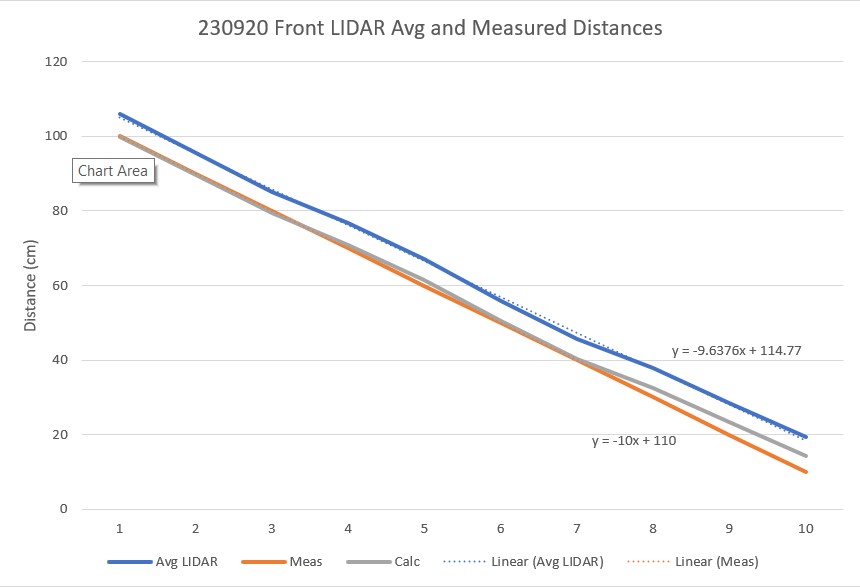
In the above chart, I used Excel’s ‘trendline’ tool to display the ‘best fit’ linear equation for both the plot of average values and the plot of actual distances. Of course the equation for the actual distances is exact, but the average values show a consistent too-high measurement.
Then I created a compensation function to make the LIDAR values look like measured values, and came up with y_comp = =0.987*(y_meas – 4.77), and plotted this line (shown in gray above). This compensation works very well for values down to about 40cm, but not so much below that. A separate compensation equation may be required for this section.
21 September 2023 Update:
I modified WallE3’s ‘GetFrontDistCm()’ function to include the above compensation expression and re-ran the test from yesterday, with the following result:
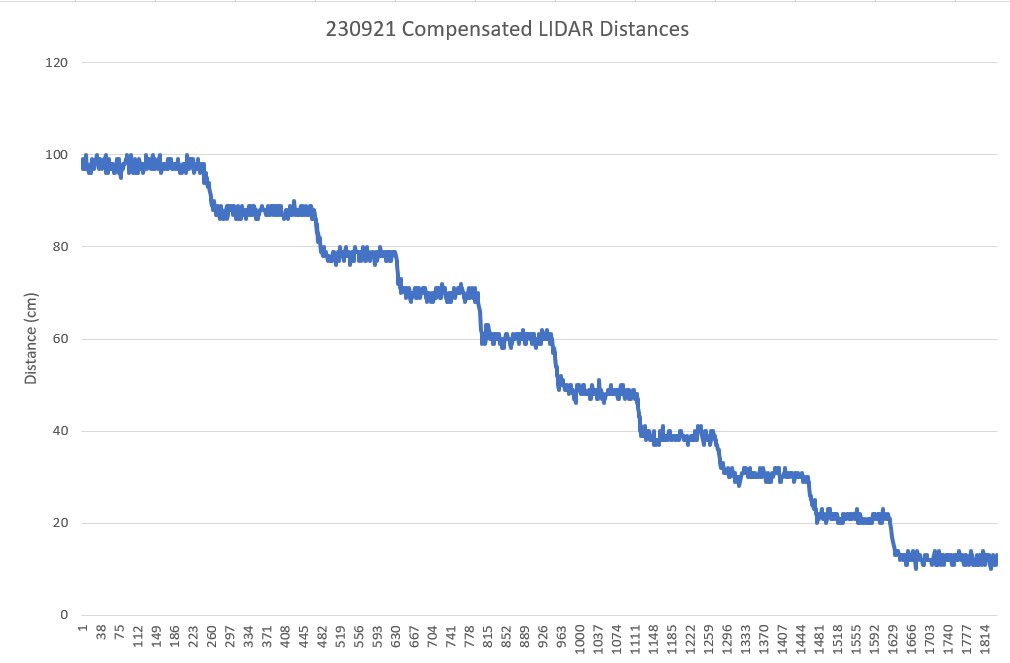
As can be seen in the above plot, the compensated distance measurements track the actual distances quite nicely. This should result in the ‘MoveToDesiredFrontDistCm()’ function behaving much better than it did before front distance compensation.
Stay Tuned!
Frank