posted 24 October 2020
After documenting left-side wall-tracking success with Wall-E2, my autonomous wall-tracking robot (see this post and this post), I started thinking about improving Wall-E2’s obstacle avoidance performance.
Wall-E2 can encounter several distinct obstacle situations during wall tracking operations. In the simplest case, Wall-E2 approaches an upcoming corner while tracking a wall, and needs to know how to transition from tracking the current wall to tracking the upcoming wall. A more difficult situation arises when Wall-E2 is ‘stuck’ – prevented from moving forward by an obstacle that isn’t detected by its front LIDAR distance sensor; a shoe, or the curved foot of a coat rack. A third situation arises when Wall-E2 encounters an obstacle that just wasn’t there a second ago; a cat or a human foot or a bag of groceries.
In the simple wall-to-wall transition case, all Wall-E2 has to do is make a right-angle turn away from the current wall and start following the next wall; this was successfully demonstrated several times in the previous posts. This maneuver utilizes a ‘spin-turn’ technique intended to minimize the backward movement of the robot while turning. This is done to prevent Wall-E2 from backing into the currently-tracked wall while attempting to turn toward and track the upcoming wall. Unfortunately, this maneuver is not always successful, whereupon Wall-E2 tries to climb backwards up the current wall, often with disastrous results.
In the ‘stuck’ case, Wall-E2 has to first recognize that it is no longer moving forward (or in any other direction for that matter), and then figure out what to do about it. Detection is accomplished by looking at the variance of front distance measurements over time; the ‘stuck’ condition is declared when the front-distance variance falls below a pre-determined value. A typical ‘stuck’ recovery maneuver is to back up slightly, and then make a right-angle turn away from the wall currently being tracked. This maneuver, while usually successful, has the same problem as the simple wall-to-wall transition; it sometimes results in the same backward-up-the-wall climb, with similar results.
The ‘suddenly appearing obstacle’ case can be handled in a manner similar to ‘stuck’ detection, but bypassing the variance measurement stage. and the resulting avoidance maneuver is similar to the ‘stuck’ case
Wall-E2 currently handles all of the above cases fairly well, except when it backs into something while maneuvering to avoid the detected obstacle. So, my challenge was to find a way to avoid running into something while backup up from something else. The easy answer to this problem was to add a rear-distance sensor to Wall-E2, and then use that information to modify obstacle-avoidance behavior as necessary.
During the changeover from ‘ping’ style distance sensors to left and right 3-element arrays of VL53L0X time-of-flight sensors I learned quite a bit about the care and feeding of the VL53L0X, and also wound up with quite a few spares. So, I took one of the spares and installed it on the rear ‘bumper’ plate on Wall-E2, as shown in the following photo:
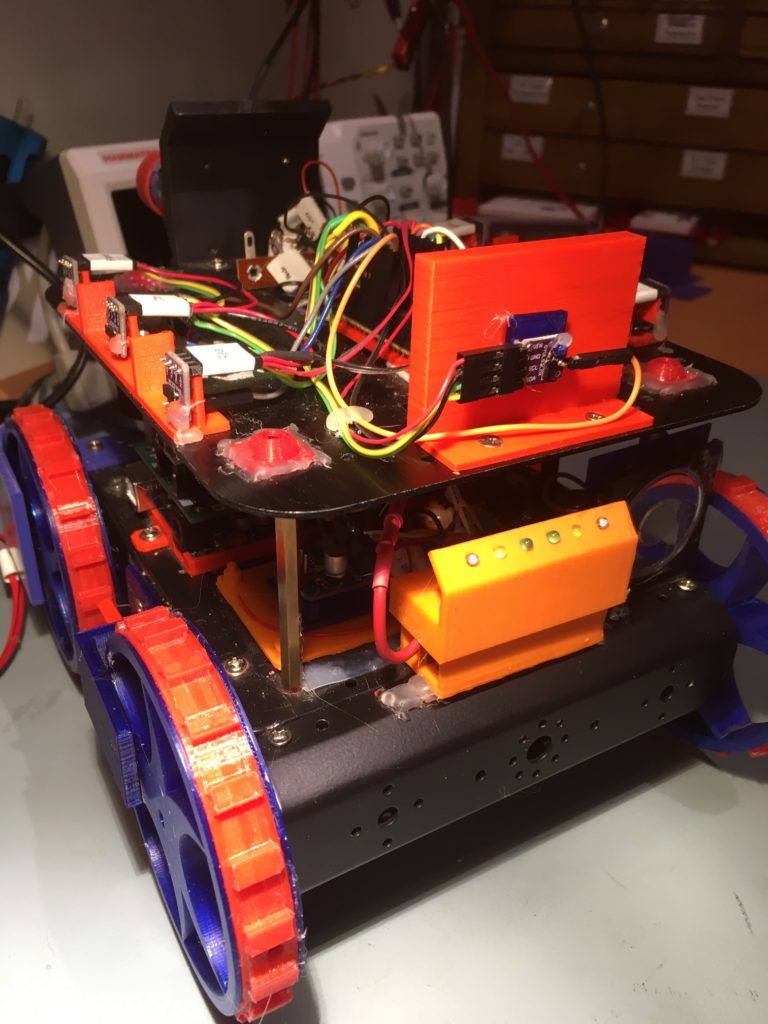
Since the 2nd-deck Teensy 3.5 was already handling both 3-element VL53L0X arrays, I simply added the rear sensor to the left-hand array ‘Wire2’ daisy-chain, and connected its XSHUT pin to Teensy pin 8. Then I modified the Teensy’s program to initialize and poll the rear sensor in the same manner as all the others, and tested it to make sure it was responding properly to rear-aspect obstacles.
The next step is to incorporate rear-aspect distance information into the various obstacle avoidance algorithms in the main program.
‘Stuck’ case:
The ‘stuck’ case by definition occurs when the mathematical variance of the last 3-5 seconds of forward distance measurements fall below a set value, indicating that the robot is no longer moving forward or backward. When this happens while wall tracking, the robot has to decide what to do. The current response is to back up for 1 second at half speed, execute a 90 deg ‘spin turn’ away from the nearest wall and then go back to normal operations.
I think I would like to enhance this algorithm as follows:
- If the measured front distance is less than MAX_FRONT_DISTANCE_CM (currently set at 400 cm) by at least STUCK_BACKUP_DISTANCE_CM (currently set at 25), then back up by STUCK_BACKUP_DISTANCE_CM using front distance measurements as the primary means of terminating the backup maneuver. If the front distance measurement cannot be used, but the rear distance measurement is valid (less than MAX_REAR_DISTANCE_CM, currently set at 100), then back up using the rear sensor measurement. If neither measurement is available, then revert back to a 1 second half-speed movement. In all cases, use the rear distance measurement to prevent ‘reverse wall climb’ by stopping the motors if the robot gets too close to an obstacle while backing up.
- Execute a ‘spin turn’ away from the nearest wall – this is the same as the current algorithm.
- Execute a ‘rolling turn’ back toward the original direction of travel. This should offset the robot further away from the nearest wall, and hopefully allow it to bypass the obstacle.
Pingback: Wall-E2 Gets a VL53L0X Array Upgrade | Paynter's Palace