Posted 01 January 2018
What a way to start off the new year! The battery charger module for my autonomous wall-following robot Wall-E2 has been completed and tested, and now has been integrated into the robot – yay!!
If you have been following this saga, you will recall that I started working on an internal charging module for Wall-E2 well over a year ago, back in November 2016 with this post. Since then I have gone through several iterations, revisions, and mis-steps (including a semi mind-boggling deep-dive into the details of the Adafruit PowerBoost 1000C specifications in this post). Last month I finally got a complete system (two PowerBoost 1000C’s integrated onto a single PCB with appropriate control and battery switching circuitry) working, and was able to run extensive charge/discharge cycle testing using a simple test circuit and an Arduino Uno to run it. So, now all I had to do was stuff the whole thing back into the robot. This task was made possible by my earlier decision to upgrade Wall-E2’s ride to a slightly larger chassis, so instead of trying to cram 2Kg of battery/charger into a 1Kg space, I now had the pleasure of fitting 2Kg into a 3Kg space – nice! Here are some photos of the integration process.
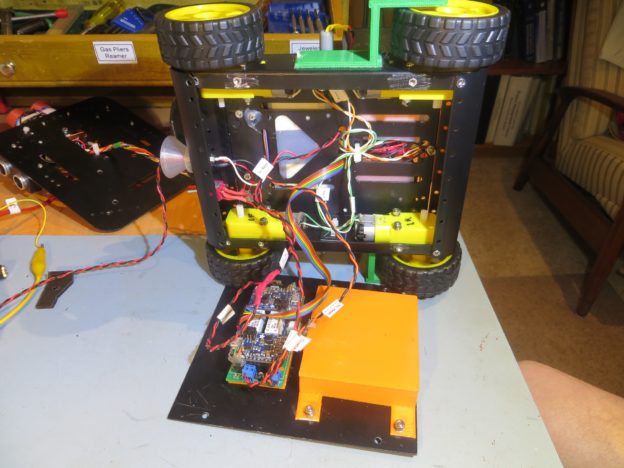
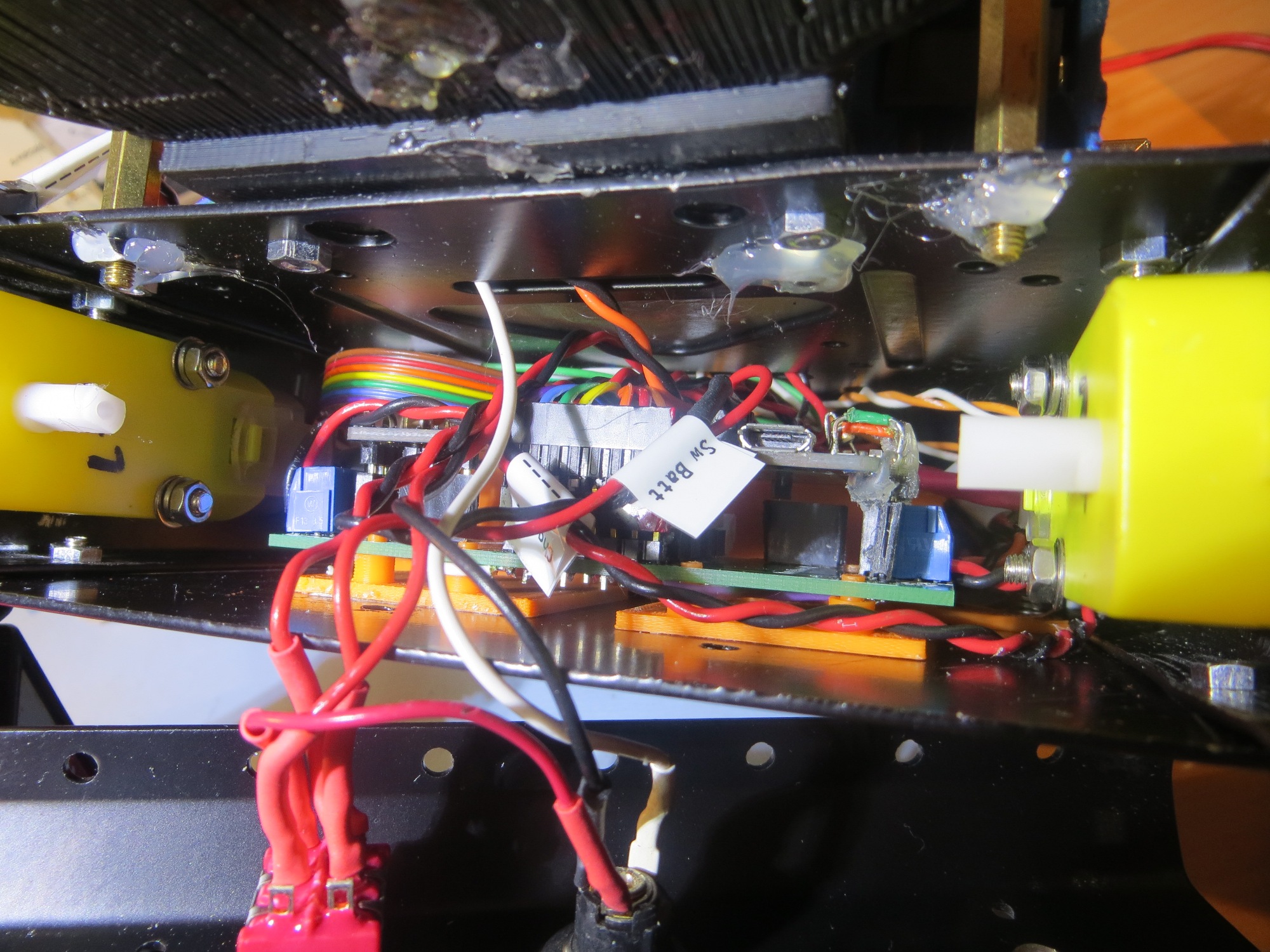
Battery module shown in the ‘maintenance’ configuration.
Another shot of Battery module in the ‘maintenance’ configuration.
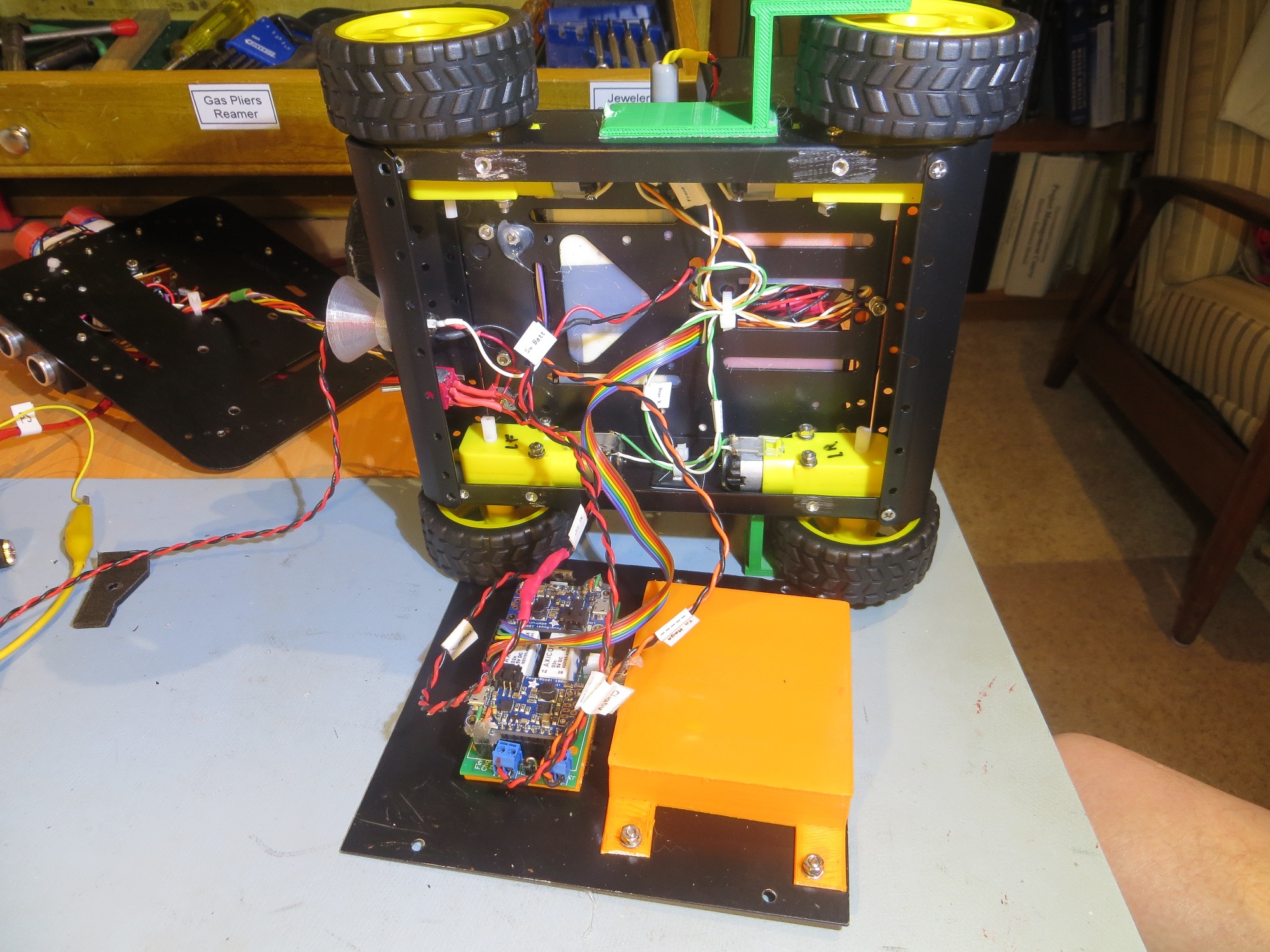
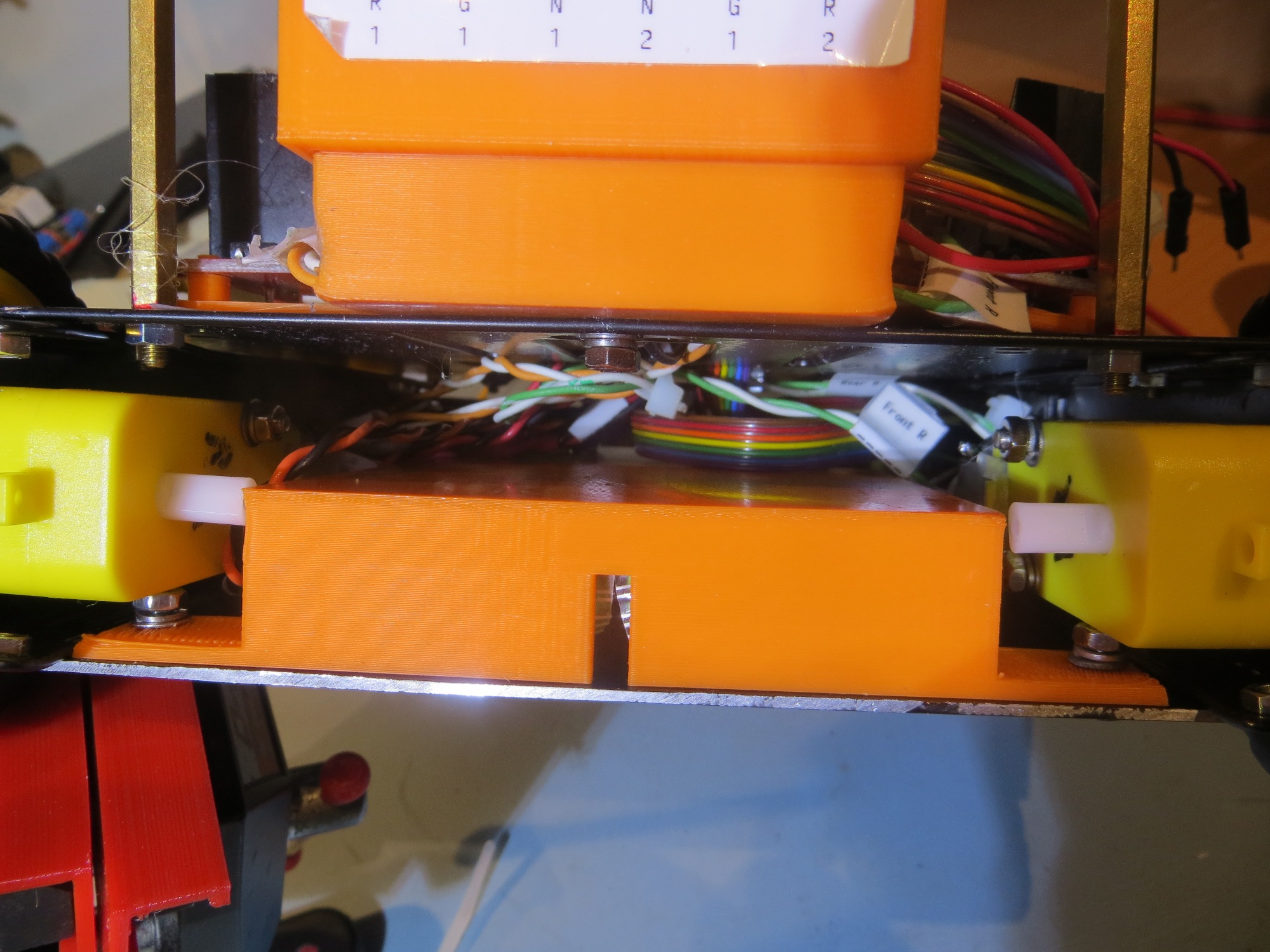
Front cover removed to show how the battery module fits into the robot. Note there is plenty of room for cable runs
Front cover removed to show how the battery module fits into the robot. Note there is plenty of room for cable runs
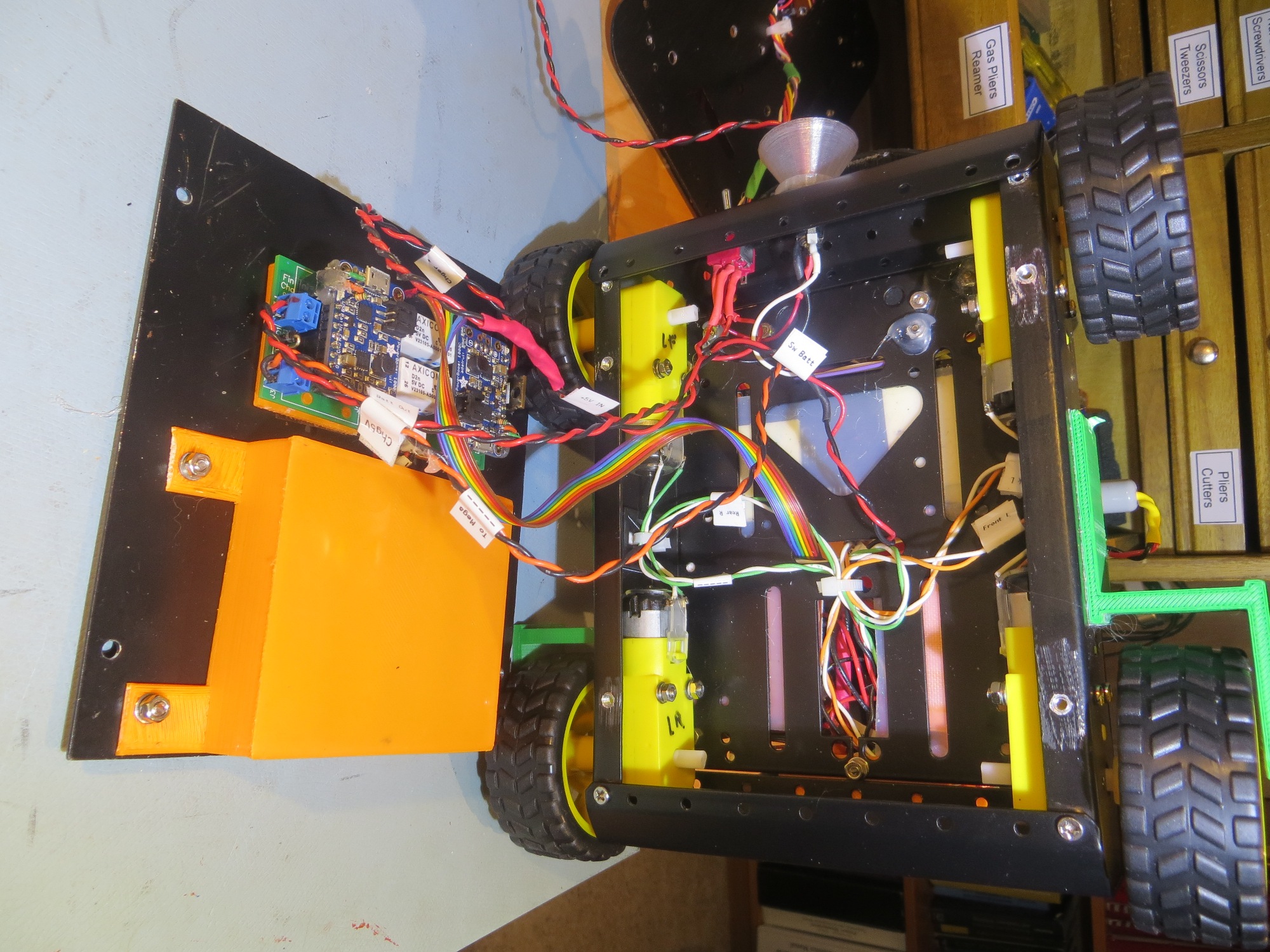
Rear cover removed to show how the battery module fits into the robot. Note there is plenty of room for cable runs
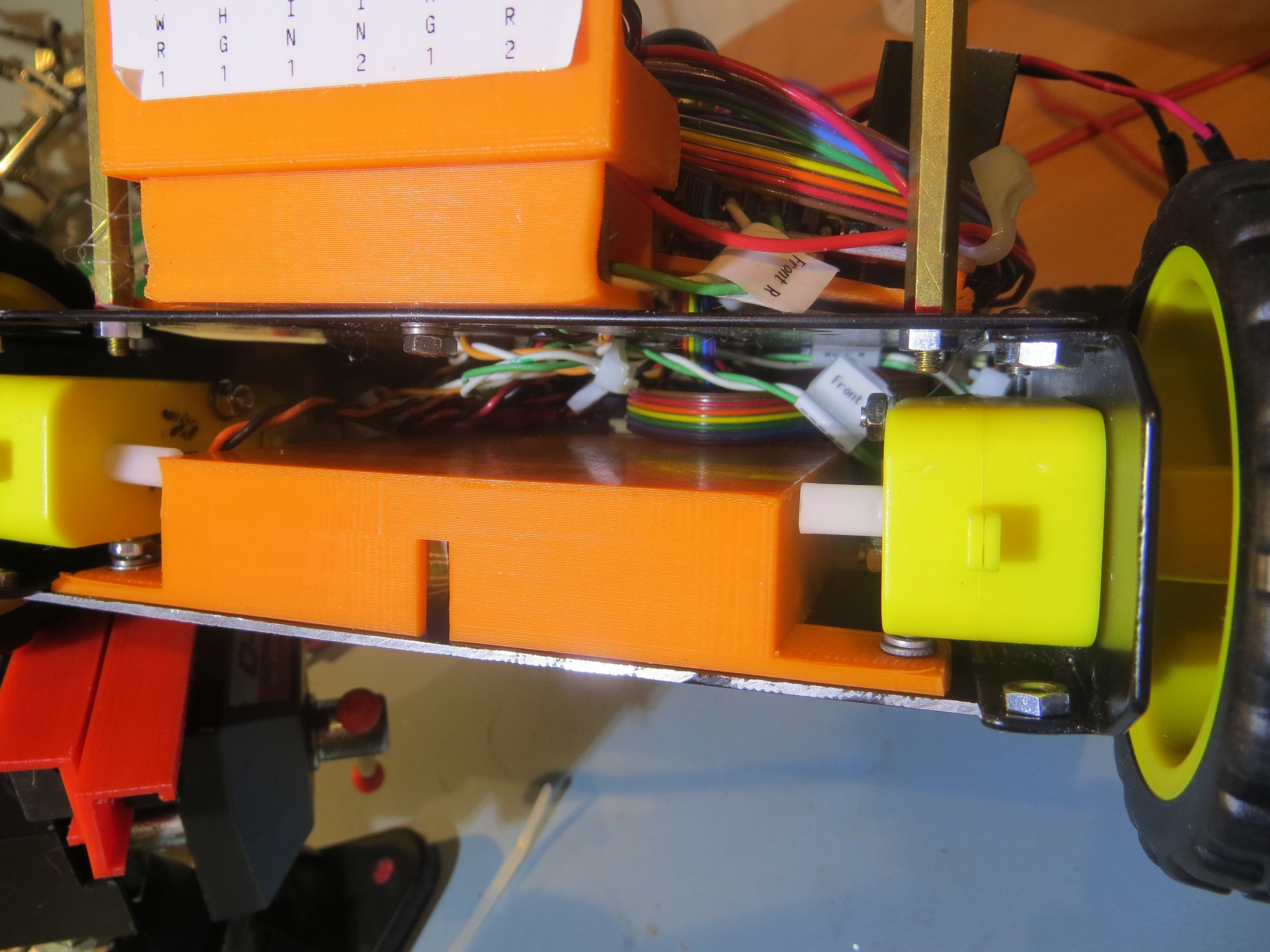
Rear cover removed to show how the battery module fits into the robot. Note there is plenty of room for cable runs
Now that the battery/charger module has been integrated into the robot chassis, I will have to make some minor changes to the robot operating system to accommodate changes I have made along the way, but these should be easy and straightforward. Then, it will be back to field testing, I hope.
Stay tuned!
Frank
Pingback: A New Chassis For Wall-E2, Part III - Paynter's Palace
Pingback: The operation was a success, but ... - Paynter's Palace