Posted 10 December 2016
Well, two important steps occurred today in my plan to take over the world (well, maybe just make Wall-E2 more human-independent). The first was the arrival of my Panasonic 18650 batteries, and the second was the successful trial of my first stab at a charging platform.
The ‘platform’ part of the charging system (the blue piece in the image below) is the part that captures and positions the robot accurately enough to connect to charging power, via contact strips on the bottom of the robot and spring-loaded contacts on the platform.
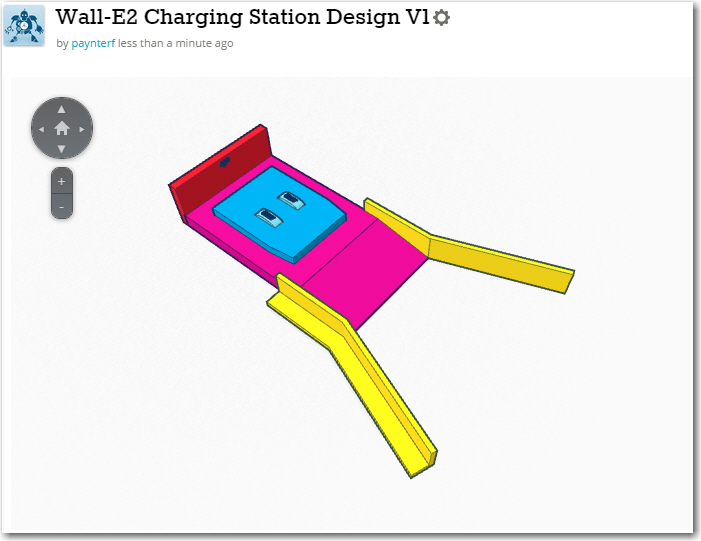
1/2-scale concept model for the Wall-E2 charging station. The blue part is the ‘charging platform’
So today I printed out a full-scale platform. This was pretty amazing by itself, as it took up nearly the entire build area, and took about 4 hours to print. Fortunately I had recently upgraded my build platform with a PEI surface and also re-leveled it, so the printer was up to the task. It did take me a while to get the darned thing OFF the build surface, as it was very well adhered to the base 😉
Robot’s eye view of the charging platform
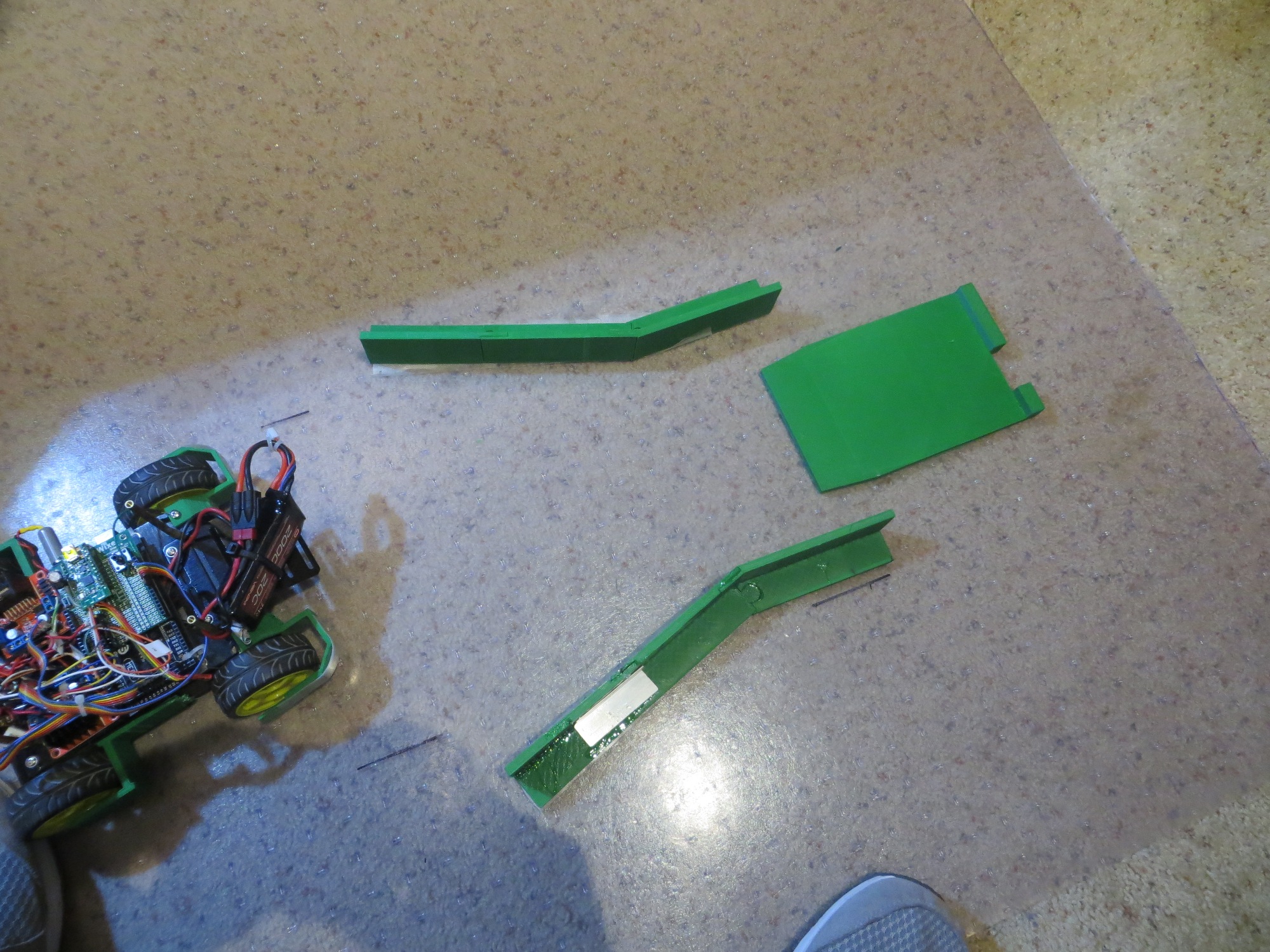
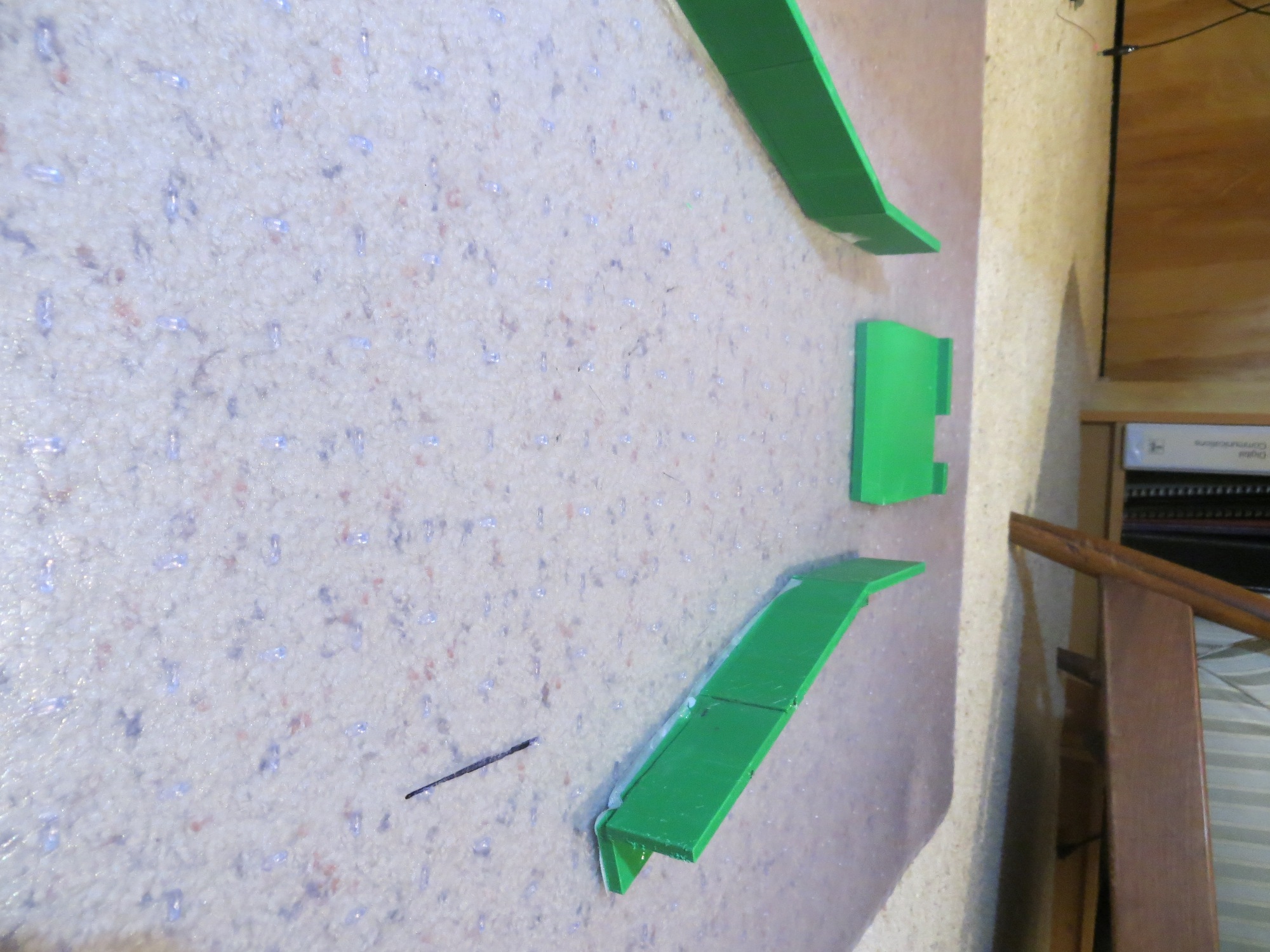
Overall view of the lead-in rails and the charging platform
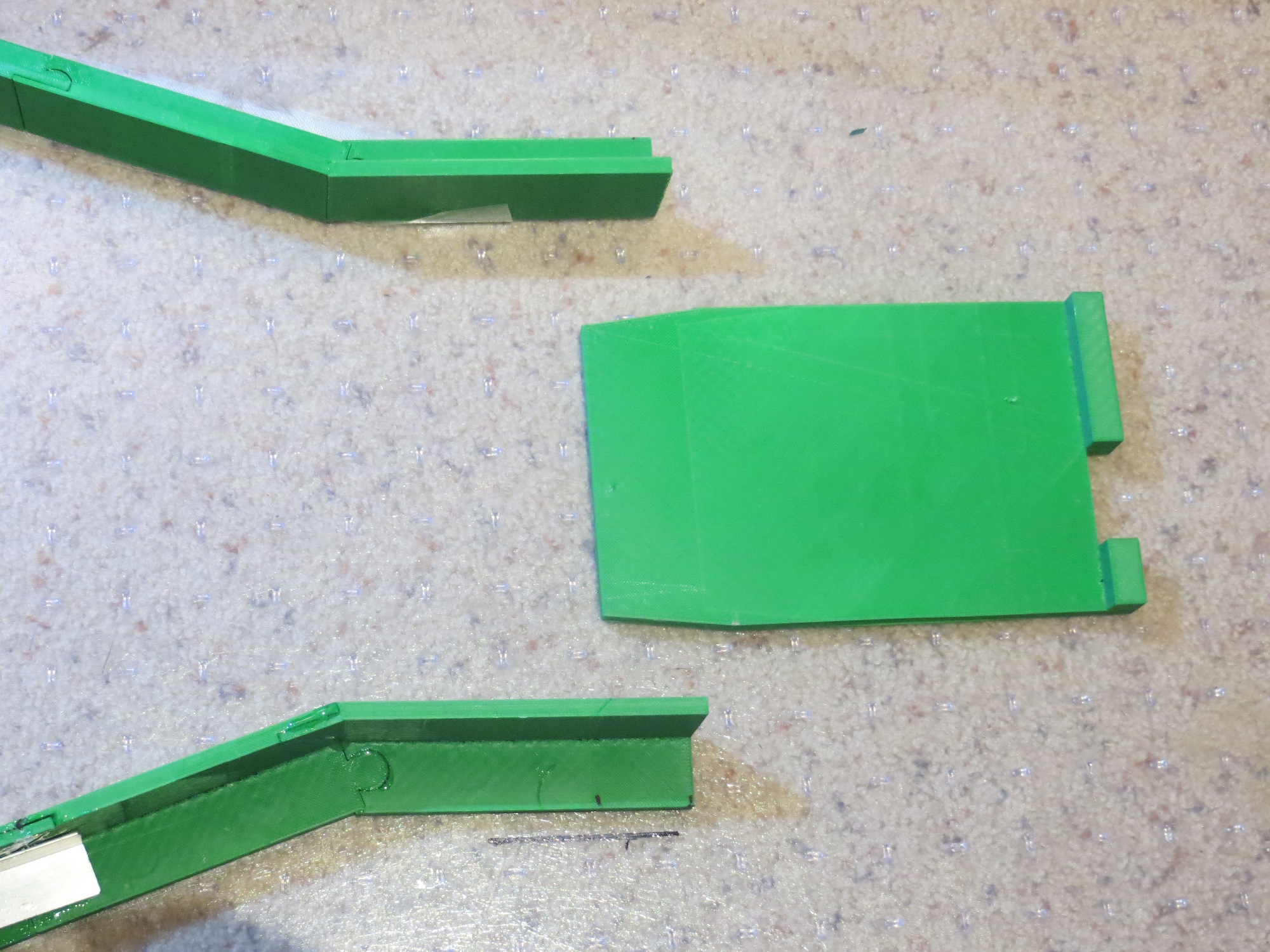
Closeup of the charging platform piece. Note the beveled section at the entry end
To test the combination of the lead-in rails and the charging platform, I double-sided taped the platform in what I hoped was the best position/orientation, and ran some more tests with the robot, as shown in the following video clip.
This last series of tests, in conjunction with my earlier work on IR following, was quite rewarding for me, as I now had incontrovertible proof that the lead-in rail/charging platform idea would really work. It might not be ‘optimum’, but I was now sure I could get the robot to track an IR beam accurately enough to get captured by the lead-in rails, and the platform would position the robot accurately enough to make the charging connections – yay!!!
Now I have to start serious work on the other end – the actual charging and battery circuitry. With the arrival of my Panasonic 18650 cells, I now have all the required parts – I just have to put them all together, make it all work, and somehow shoehorn the entire mess into the robot!
Stay tuned,
Frank