Posted 04 November 2016
As a result of my now extensive testing with the OSEPP IR Follwer module, I have become convinced that it’s just not going to work for my intended IR homing application. As shown in the following plot (copied from a previous post), the six detectors each have a usable spatial detection width of about 10-15 º. However, because they are mounted to cover a 180 º, there is a ‘dead zone’ of about 20 º between each detector position.
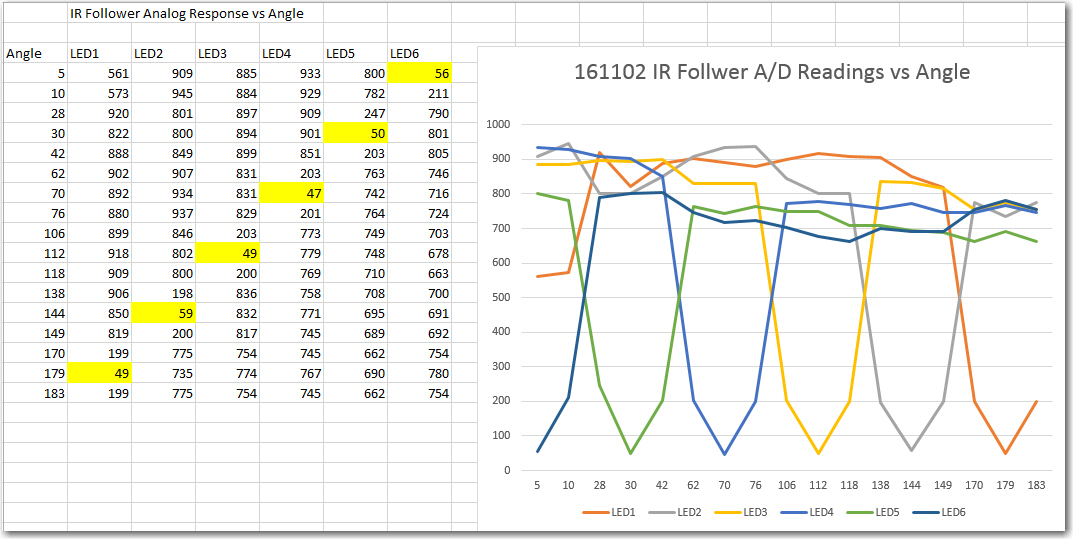
Results from fourth heading tests on bench-top range. For this test, the idea was to determine the approximate beamwidth of each detector
If the IR homing beam falls into one of these dead zones, it will be very difficult to generate an appropriate steering value, so steering behavior will probably be more like a ‘bang-bang’ setup than something that can be used to home in on my planned charging station.
The good news is I learned a lot during this exercise, and one of the things I learned is that I don’t really need most of the circuitry on the OSEPP module. I wound up using only the analog outputs from the OSEPP module, and according to the OSEPP schematic shown below, this is just the raw detector voltage.
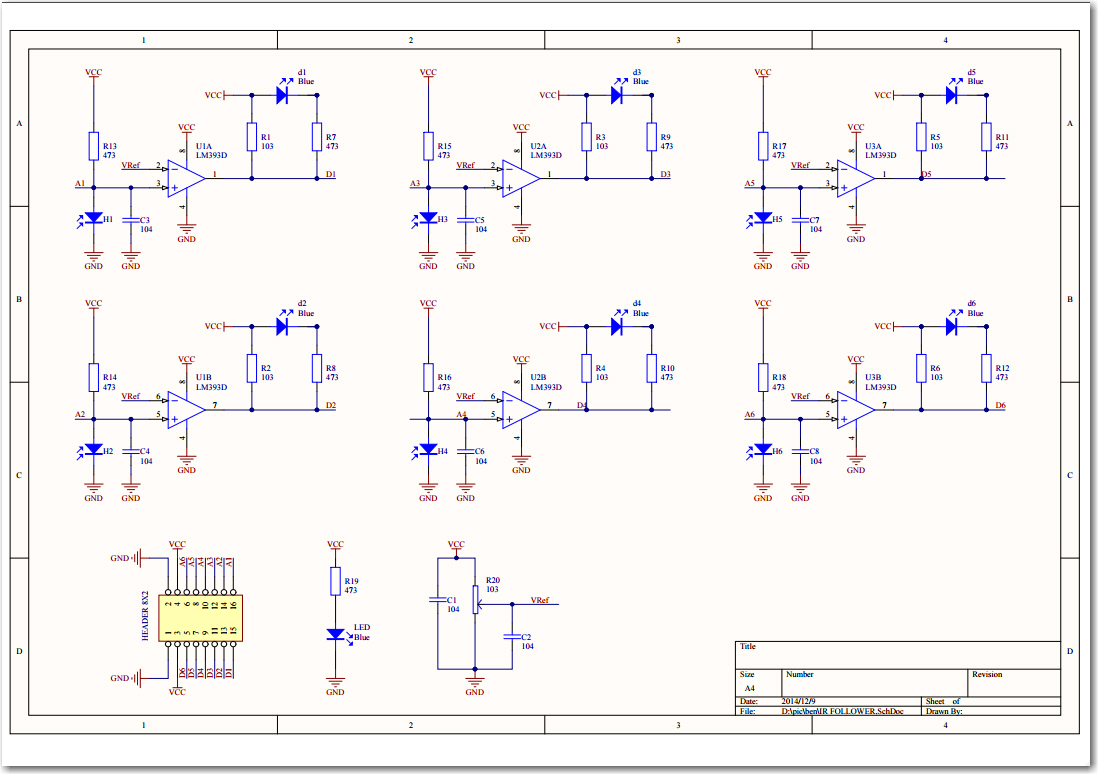
OSEPP IR Follower schematic. Note the analog out is just the raw detector voltage
So, using my trusty PowerSpec 3D Pro 3D printer I should be able to fabricate my own IR detector array, with the detectors spaced closely enough so that their half-power beam edges overlap significantly. That should mean that I can determin the IR homing beam angle-of-arrival (AOA) within just a few degrees, which in turn should mean much more accurate and continuous steering information.
Stay tuned!
Frank