Posted 06/13/16
In my last post on this subject back in April, I had managed to figure out that my feeble attempts to compensate my on-robot magnetometer for hard/soft iron errors wasn’t going to work, and I was going to have to actually do a ‘whole sphere’ calibration to get any meaningful azimuth values from my magnetometer as installed on my robot.
As noted back in April, I had discovered two different tools for full-sphere magnetometer calibration (Yuri Matselenak’s program from the DIY Drones site, and Alain Barraud’s MATLAB script from 2008), but neither of them really filled the bill for an easy-to-use GUI for dummies like me. At the end of April’s post, I had actually built up a partial GUI based on devDept’s EyeShot 3D viewport technology that I had lying around from a previous lifetime as a scientific software developer. All I had to do to complete the project was to figure out how to integrate Alain’s MATLAB code into the EyeShot-based GUI and I’d be all set – or so I thought! ;-).
Between that last post in April and now, I have been busy with various insanities – competitive bridge, trying to develop a 3-point basketball shot, and generally screwing off, but I did manage to spend some time researching the issue of MATLAB-to-C# code porting. At first I thought I would be able to simply port the MATLAB code to C# line-by-line. I had done this in the past with some computational electromagnetics codes, so how hard could it be, anyway? Well, I found out that it was pretty fricking hard, as in effectively impossible – at least for me; I just couldn’t figure out how to relate the advanced matrix manipulations in Alain’s code to the available math tools in C#. I even downloaded the Math.NET Numerics toolkit from http://numerics.mathdotnet.com/ and tried it for a while, but I just could not make the connection between MATLAB matrix manipulation concepts and the corresponding ones in the Numerics toolkit – argghhh!!!.
After failing miserably, I decided to try and skin the MATLAB cat a different way. I researched the Gnu Octave community, and discovered that not only was there a nice Octave GUI available for windows, but that some developers had been successful at making calls into the Octave dll’s from C# .NET code – exactly what I needed!
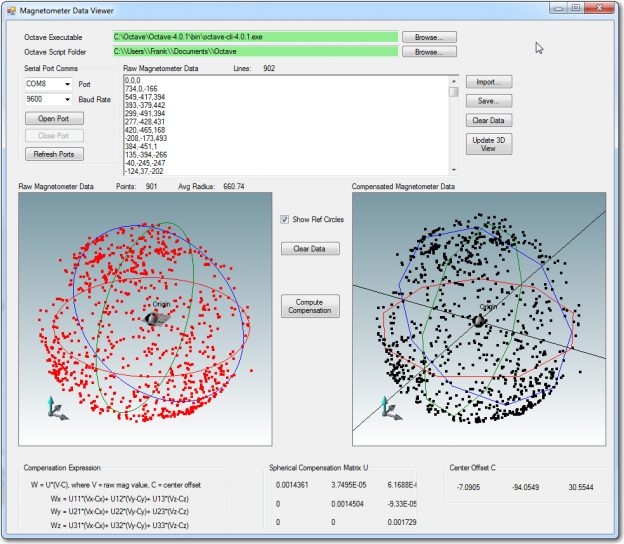
So, it was full steam ahead (well, that’s not saying much for me, but…) with the idea of a C#.NET GUI that used my EyeShot 3D viewport for visualization, and Octave calls for the compensation math, and within a few weeks I had the whole thing up and running – a real thing of beauty that I wouldn’t mind sharing with the world, as shown in the following video clip.
Unfortunately, after doing all this work I discovered that my EyeShot redistribution license for the 3D viewport library had long since expired, and although I can run the program happily on my laptop, I can’t distribute the libraries anywhere :-(((((.
Ah, well, back to the drawing board!
Frank
(author’s note: Although I did this work back in the April/May timeframe, I didn’t post about it until now. I decided to go ahead and post it now as a ‘prequel’ to the next post about my ‘final solution’ to the magnetometer calibration utility challenge)
Pingback: Magnetometer Calibration, Part III - Paynter's Palace