Posted 04/22/15
In my last post I analyzed a stuck/un-stuck scenario where Wall-E got stuck on a coat rack leg, and then got himself unstuck a few seconds later. This post deals with a similar scenario, but with the evil stealth slippers instead of the coat rack, and this time Wall-E didn’t get away :-(.
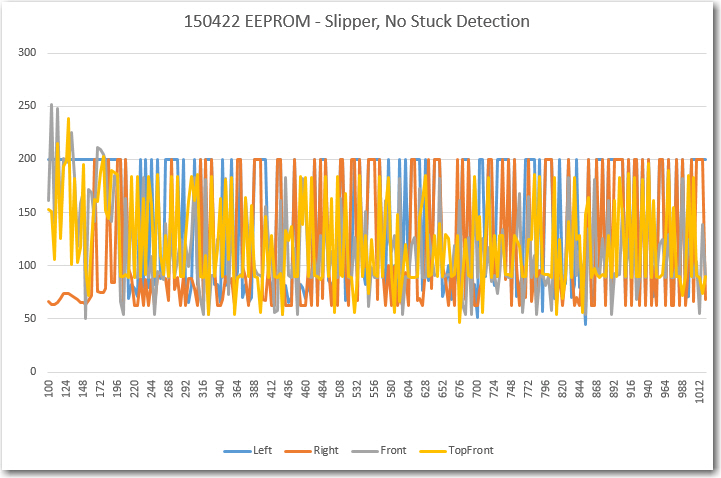
EEPROM data from Wall-E slipper run. Note large variations on all four channels.
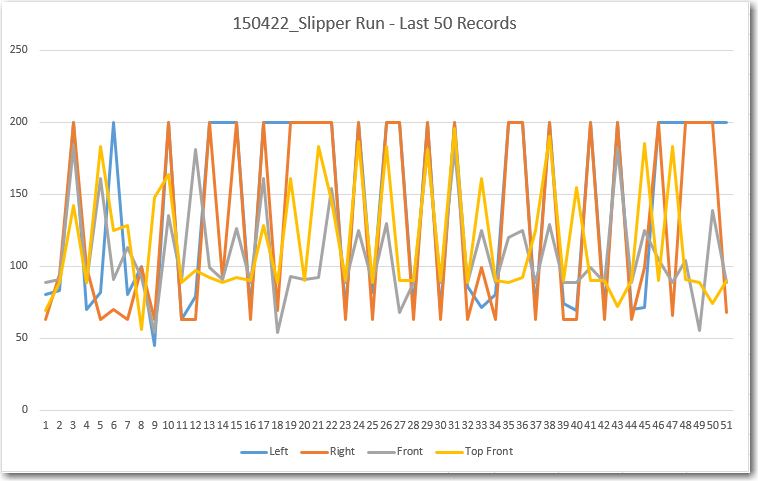
Last 50 records, showing large amount of variation on all four channels.
Analysis:
- T = 09: Wall-E hits his nemesis, the evil Stealth Slippers
- T + 37: Wall-E signals that it has filled the EEPROM. No ‘stuck’ detection, so no sensor array data.
- My initial impression of the 4-channel EEPROM record was “Geez, it’s just random garbage!”. There does not appear to be any real structure to the data, and certainly no stable data from the left and right side sensors. Moreover, the top front sensor – the one that was supposed to provide nice stable data even in the presence of the stealth slippers – appears to be every bit as unstable as the others – ugh!
- In order to more closely examine the last few seconds of data, I created a new plot using just the last 50 or so records. From this it is clear that both the left and right side sensor data is unstable and unusable – both channels show at least one max-distance (200 cm for the side sensors) excursion. The front and top-front data doesn’t fare much better, with 4-5 major excursions per second.
- The only bright spot in this otherwise panoply of gloom is that the front and top-front sensor data shows a lot of intra-sensor variation, meaning that this might be used to effect a ‘stuck’ declaration. In the last 50 records, there are 4 records where ABS(front-topfront) > 85 (i.e. > MAX_FRONT_DISTANCE_CM / 3). Looking more closely at the entire EEPROM record, I see there are 18 such instances – about one instance per 50 records or so, or about 1 per second. Unfortunately, at least 6 of these occur in the first third or so of the entire record, meaning they occur before Wall-E gets stuck on the slipper. So much for that idea :-(.
Despite the gloom and doom, this was actually a very good run, in that it provided high-quality quality data about the ‘stealth slipper detection’ problem. The fact that the data shows that one of my ideas for detection (the intra front sensor variation idea) simply won’t work, as that variation is present in all the data, not just when Wall-E is stuck. At least I don’t have to code the detection scheme up and then have it fail! ;-).
It is just barely possible that I have caused this problem by restricting the max detection distance for the front sensors to 250 cm in an effort to mitigate the multipath data corruption problem. So, I’m going to make another run (literally) at the slippers but with the max front distance set out to 400 cm versus the existing 255 cm limit. However, this will cut the recording capacity in half, as I’ll have to use 2 bytes per record. I can compensate for this by not storing the left and right sensor data, or by accepting a shorter recording time, or some combination of these. One idea is to store the left & right sensor data as bytes, and the front sensor data as ints. This will require modifying the EEPROM readout code to deal with the different entry lengths, but oh well….
Stay tuned…
Frank