Posted 13 August 2019
In my last post on this subject, I discussed the idea of using orientation information to compensate raw wall offset distance values to account for the errors associated with robot orientation. The idea was that if I could do that, then Wall-E2 would know how far he was away from the wall regardless of orientation, and would be able to make appropriate corrections to get to and stay at a predetermined offset from the wall.
Well, it didn’t really work out that way. After getting through the geometry analysis and the math, it turned out that in order to use the compensation algorithm, I have to know the initial robot orientation with respect to the wall, and I don’t :-(. Without knowing this, it is basically impossible to apply the correct compensation. For example, if the robot is originally oriented 30º away from the wall, then a ‘toward-wall’ rotation will cause the measured distance to go down, and an upward compensation is required. However, if the robot is initially oriented toward the wall, then that same ‘toward-wall’ rotation will cause the measured distance to go up and a downward compensation is required – bummer!
However, all is not lost; the ability to perform relatively precise angular rotations means that I can use incremental rotations for acquiring and then tracking a predetermined offset distance. In the acquisition phase, the robot orientation is changed in 10º increments in the appropriate direction, and an N-point slope calculation is performed to determine whether or not the current ‘cut angle’ will allow the robot to eventually reach the predetermined offset distance. As the robot approaches the offset line, the cut angle is reduced until it is zero, in theory resulting in the robot travelling parallel to the wall at the offset distance. At this point the robot transitions from ‘capture’ to ‘track’ mode, and the response to distance deviations becomes more robust.
This strategy was implemented using my 2-motor robot, and seems to work well once the normal crop of bugs was eradicated. The following Excel plots show the results of two short runs where the robot first captured and then tracked a 30cm offset setting.
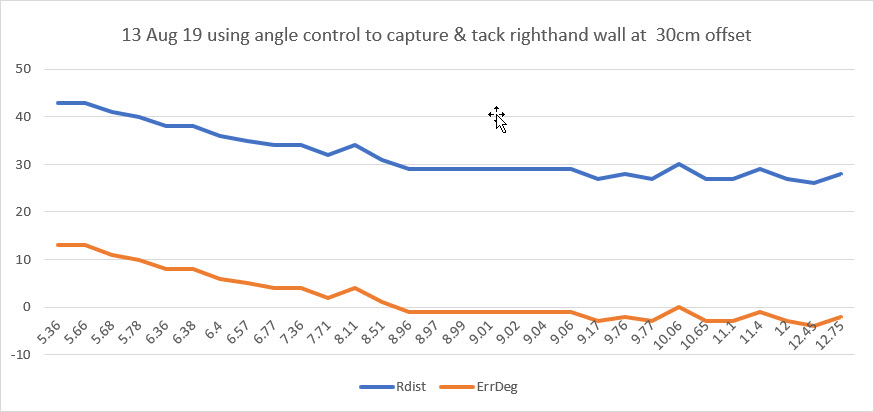
Capture and track a 30cm wall offset starting from the outside
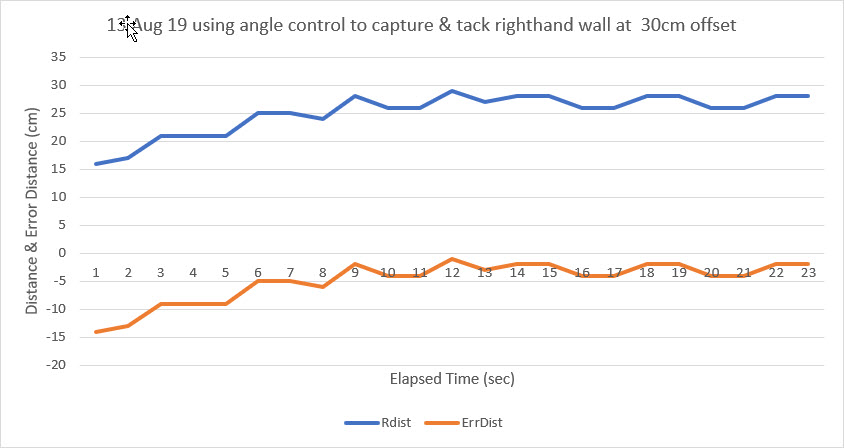
Capture and track a 30cm wall offset starting from the inside
So far I have only implemented this completely for the right side, but as the left side is identical, I anticipate no problems in this regard.
Future Work:
So far I have demonstrated the ability to capture and then track a predetermined wall offset distance, starting from either inside or outside the desired offset distance. This represents a quantum leap in performance, as Wall-E2 currently can only track whatever distance it first measures – it has no capability to capture a desired offset distance. However, there are still some ‘edge’ cases that need to be dealt with one way or the other. For instance, if the robot orientation is too far away from parallel, the current algorithm won’t be able to rotate it enough to capture the desired offset or the measured distance will exceed the max range gate of the ping sensors (currently set at 200cm). These conditions may not be all that deleterious, as eventually Wall-E2 will get close enough to something to trigger an avoidance response, thereby resetting the entire orientation picture (hopefully to something a little more parallel).
In addition to the wall tracking problem, the new capability to make reasonably precise angular rotations should significantly improve Wall-E2’s performance in handling ‘open-corner’ and ‘closed-corner’ situations; currently these cases are handled with timed turns, which are only correct for one floor covering type (hard vs soft) and battery state. With the heading measurement capability, a 90º corner turn will always be (approximately) 90º whether it is on carpet or hard flooring. In addition, now I can program in obstacle avoidance step-turns for approaching obstacles instead of relying entirely the ‘backup-and-turn’ approach.
Stay tuned!
Frank
Pingback: Sparkfun MPU9250 Test with Teensy 3.2 - Paynter's Palace
Pingback: Heading-based Turns Using MPU6050 and Polling vs Interrupts - Paynter's Palace
Pingback: Back to the future with Wall-E2. Wall-following Part VII | Paynter's Palace