
Posted 13 January 2018
Back in November of last year I started moving Wall-E2 to his new home in a larger chassis, and subsequently I was able to integrate the new-improved charging system in to this new chassis.
So, today I started some field testing, and discovered a major problem – the motors that came with the new chassis don’t have sufficient torque to handle the operating environment – they stall out much too quickly when encountering any movement issues at all. This wasn’t a problem for the previous incarnation of Wall-E2, so clearly the motors that came with the new chassis have different speed/torque specs than before. And, of course, the old motors won’t fit into the new chassis (actually, they do fit, but not with the new battery pack). What a bummer!
So, I started researching dc motors to determine if I could find motors with the speed/torque specs of the old chassis, but with the physical specs of the motors that came with the new one.
Motors in previous ‘Pirate’ chassis:
The specs for the motors that came with the DF Robots ‘Pirate’ chassis are shown below:
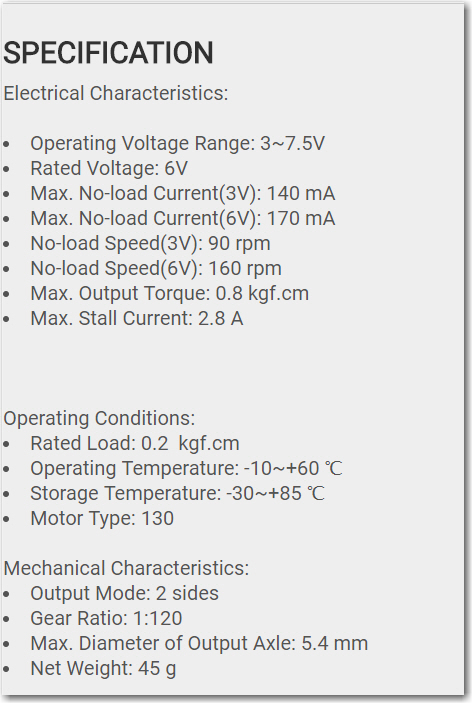
Specifications for the motors using in the ‘Pirate’ robot chassis from DFRobots
With a gear ratio of 160, the motors should produce about 160 RPM at At Wall-E2’s normal operating range of 6-7.5V, and can produce a maximum torque of 0.8 kgf-cm (kilogram force – cm).
Motors in new chassis:
A DRIVE MOTOR GEARBOX REDUCTION RATIO: 1:48
DRIVE MOTOR NO-LOAD SPEED: 220RPM
I couldn’t find the max torque specification, but assuming it’s the same basic motor body, the much lower gear ratio should result in the observed higher no-load speed and lower torque.
So, I’m fairly confident that I now know why the motors in the new chassis aren’t performing as well as the old ones – a much lower gear ratio. Now all I need to do is find another motor source with the same form factor as the new ones, but with a gear ratio more like the ones from the older chassis:
Pololu:
I found a 120:1 gear ratio right-angle motor at Pololu
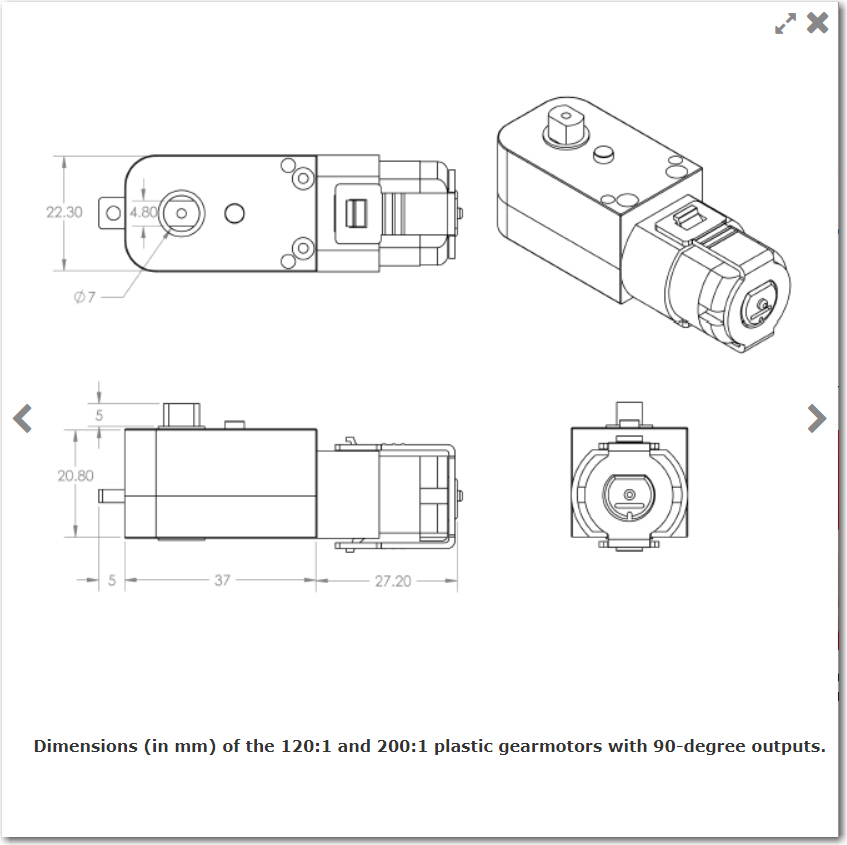
Pololu 120:1 right-angle motor dimensions

Pololu 120:1 right-angle motor
These motors have almost the same exact dimensions as the ones in the new chassis, but they have a shorter (5 vs 9mm) and larger diameter shaft (7 vs 5mm). These are not insurmountable difficulties, but surely I can find a better fit.
Ebay:
So, eventually I ended up back on eBay, the same place where I got the new chassis. But, this time I was a little more informed about what gear ratio I wanted, and so was able to reasonably quickly locate a set of 4 motors (without wheels – I have too many already!), as shown below

4ea 1:120 right-angle shaft motors with 5mm shaft diameter
So, now all I have to do is wait 2-3 weeks for them to arrive, and I should be back in the low(er)-speed, high(er)-torque business!
Stay tuned!
Frank