Posted 18 October 2017
Wall-E2’s on-board battery system has gone through some major changes over the last three years or so. Back in October 2015 I implemented an on-board battery pack & charger using two Sparkfun boost chargers and two 2000 mAh LiPo batteries as shown in the following image.
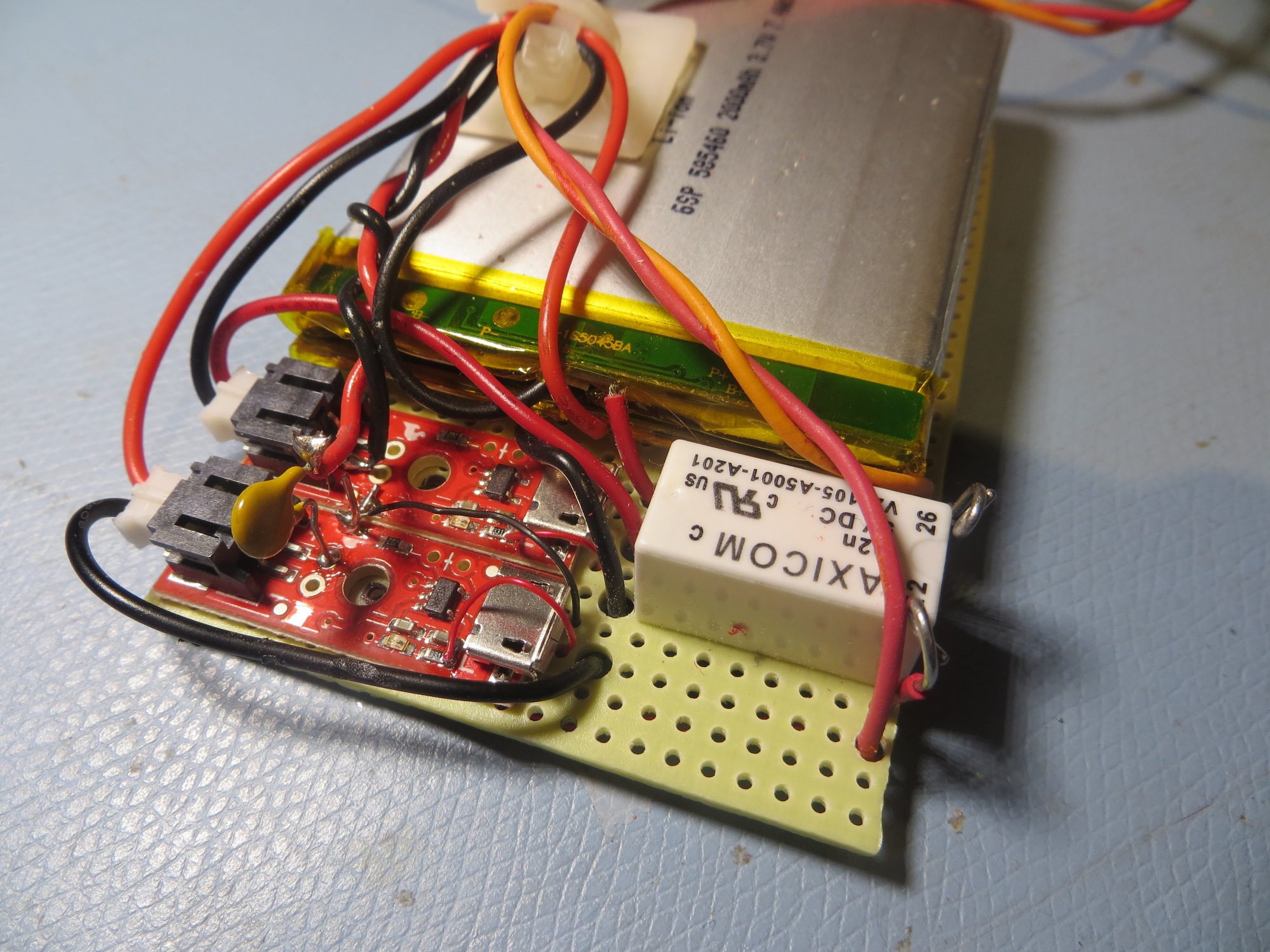
Battery pack showing charging modules and switching relay. The tan capacitor-looking component is actually a re-settable fuse
This was a technical success, but a practical failure; the LiPo cells just didn’t have the oomph to handle the high motor currents, and the single relay design had some problems as well. So, in December 2015 I replaced the entire on-board battery system with a much higher discharge capacity RC battery, the GForce 2200 battery pack, as shown below

Current Wall-E2 battery pack
However, using this battery required that I physically disconnect the battery and connect it to an off-board charger for recharges, which meant I could never implement my idea of an autonomous robot.
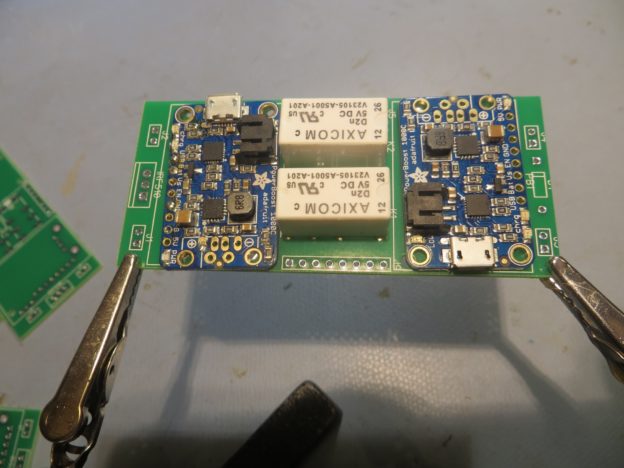
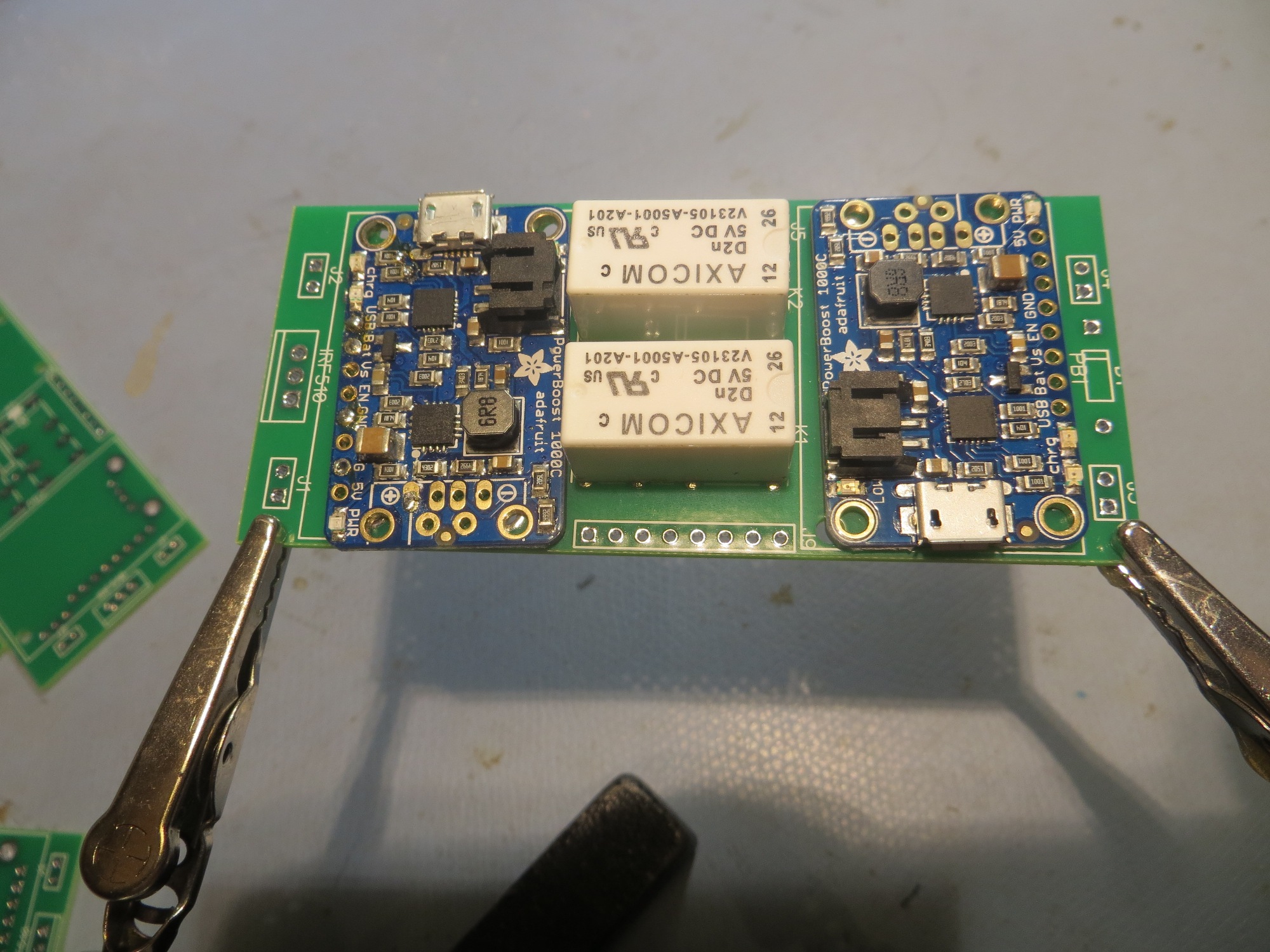
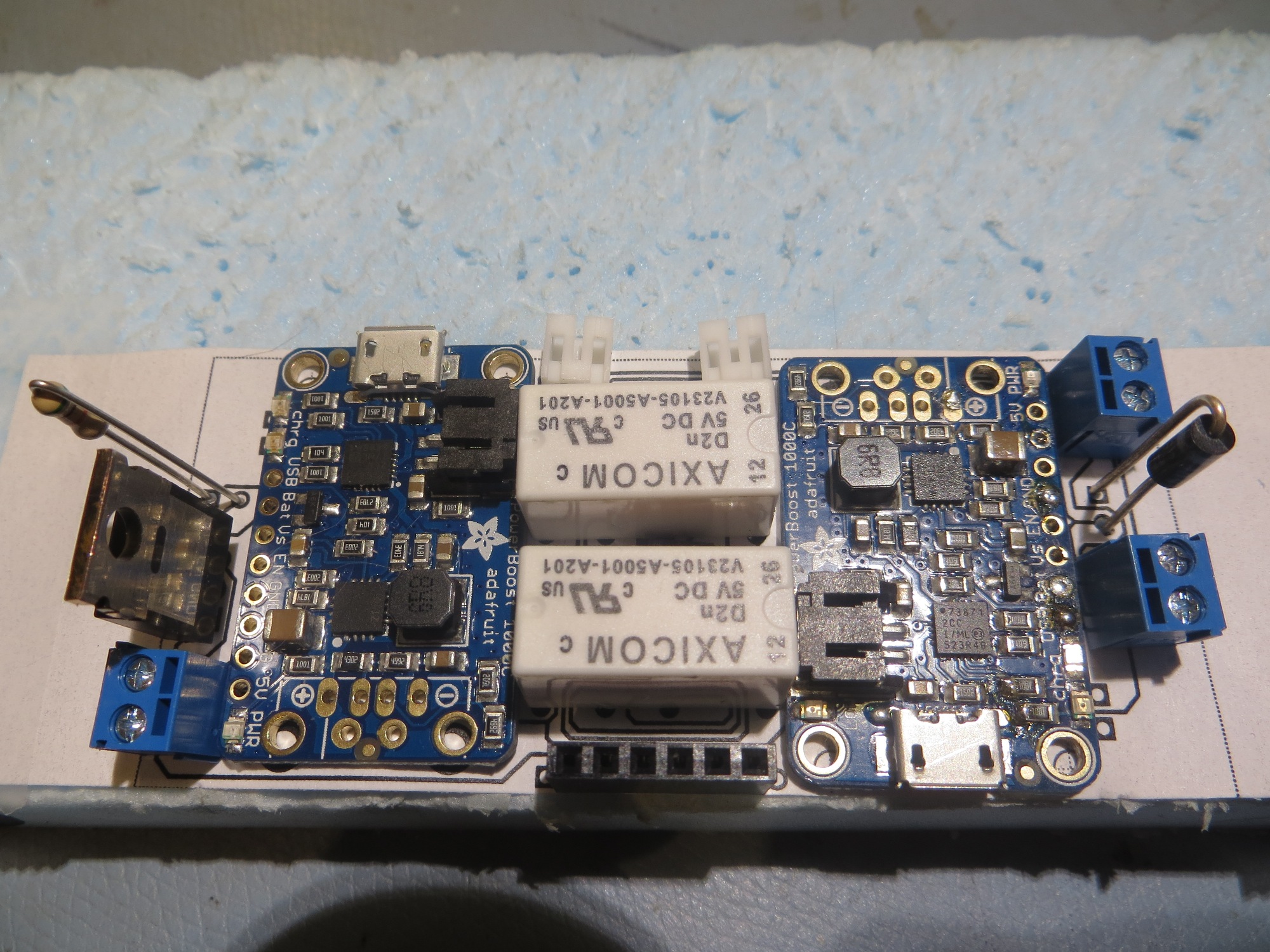
So, about a year ago, I re-implemented the on-board charging system, but with two significant changes; I used two 2-cell stacks of 3700 mAh 18650-style 3.7V li-ion batteries (specifically the NCR18650B cell) instead of the 2000 mA LiPo flatpacks, and two Adafruit PowerBoost 1000C chargers instead of the Sparkfun units. I also added a second Axicom DPDT relay to solve the previous overvoltage issue. The result is shown in the photograph below
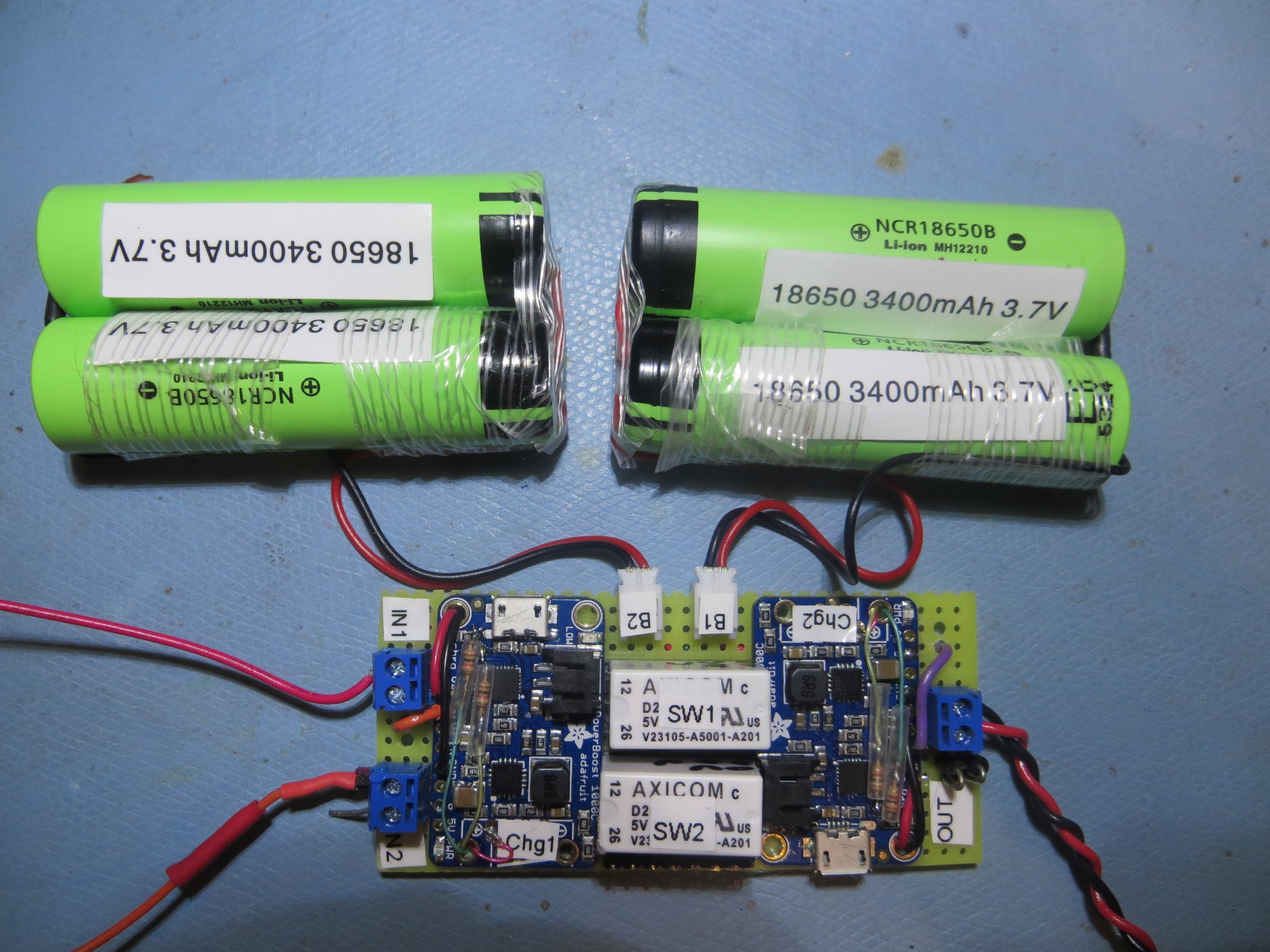
Finished charging module connected to two 2-cell 3.7V battery packs
This system worked very well, and with the modifications discussed in this post from last January (January 2017), I had a complete system for autonomous on-board charging.
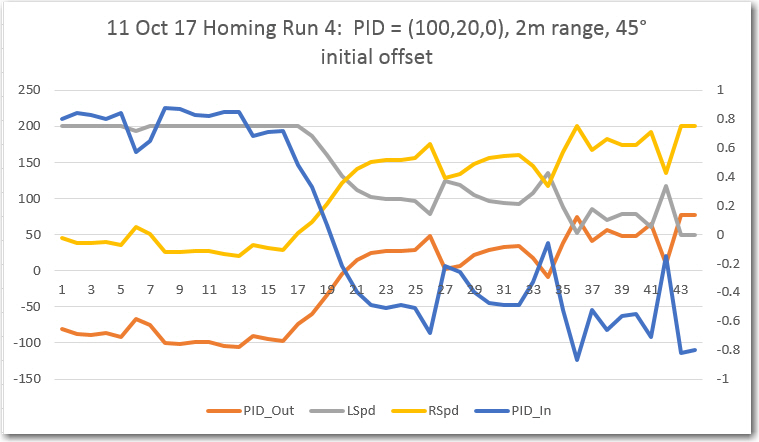
This system has worked extremely well, but now I wanted to duplicate it for a planned upgrade to a larger robot platform, and I really wasn’t looking forward to hand-wiring another board. What I needed was a PCB, so I (or anyone else) could fabricate any number of charging modules without the PITA factor of a hand-wired perf-board implementation, so I decided to see If I could make a PCB using the free version of DipTrace.
After fumbling around for a while in DipTrace, I soon realized that in order to do a good job with a PCB design, I needed a component and associated PCB pattern for the Adafruit PowerBoost 1000C, and AFACT, none existed – at least not in a form compatible with DipTrace. So, after some more fumbling around, I came up with the following model for the PB1K
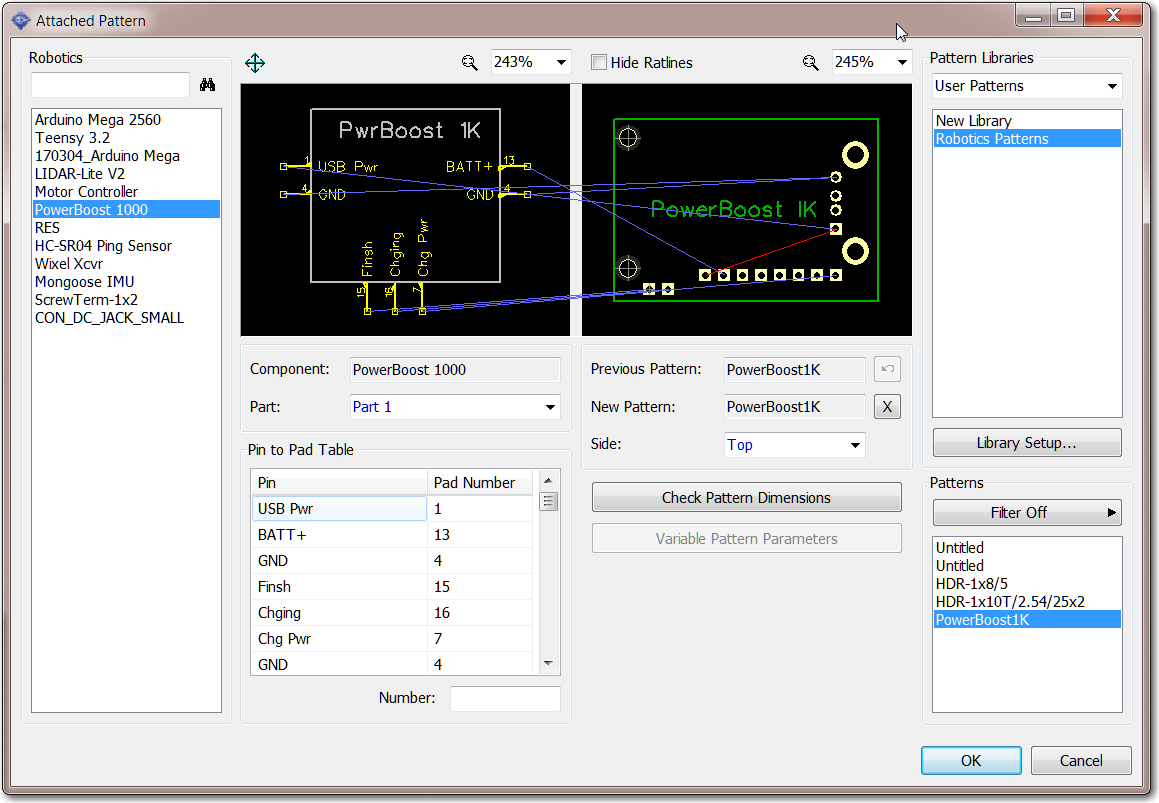
DipTrace component model for the Adafruit PowerBoost 1000C
Creation of this component was complicated by the fact that I needed ‘flying lead’ connections to the ‘charging’ and ‘finished’ LED drivers on the PB1K module – signals that aren’t exposed to the outside world. Eventually I hit upon the idea of adding a couple of ‘off-board’ pads (shown above at the lower left corner of the pattern), and assigning them to the ‘Finish’ and ‘Charging’ functions of the component layout. The ‘Chg Pwr’ signal already existed on the breakout header as the ‘Power’ signal, so I didn’t need anything for that. These modifications allowed me to integrate the PB1K module into the charger schematic and the PCB layout using the normal DipTrace project work flow.
After getting what I thought was a successful layout, I clicked the ‘Order PCB’ button in the PCB editor, and ordered their minimum of two PCBs for $30 + shipping (I actually received 4ea PCBs so it was an even greater deal than normal!).

PCBs as received from Bay Area Circuits – nice packaging!
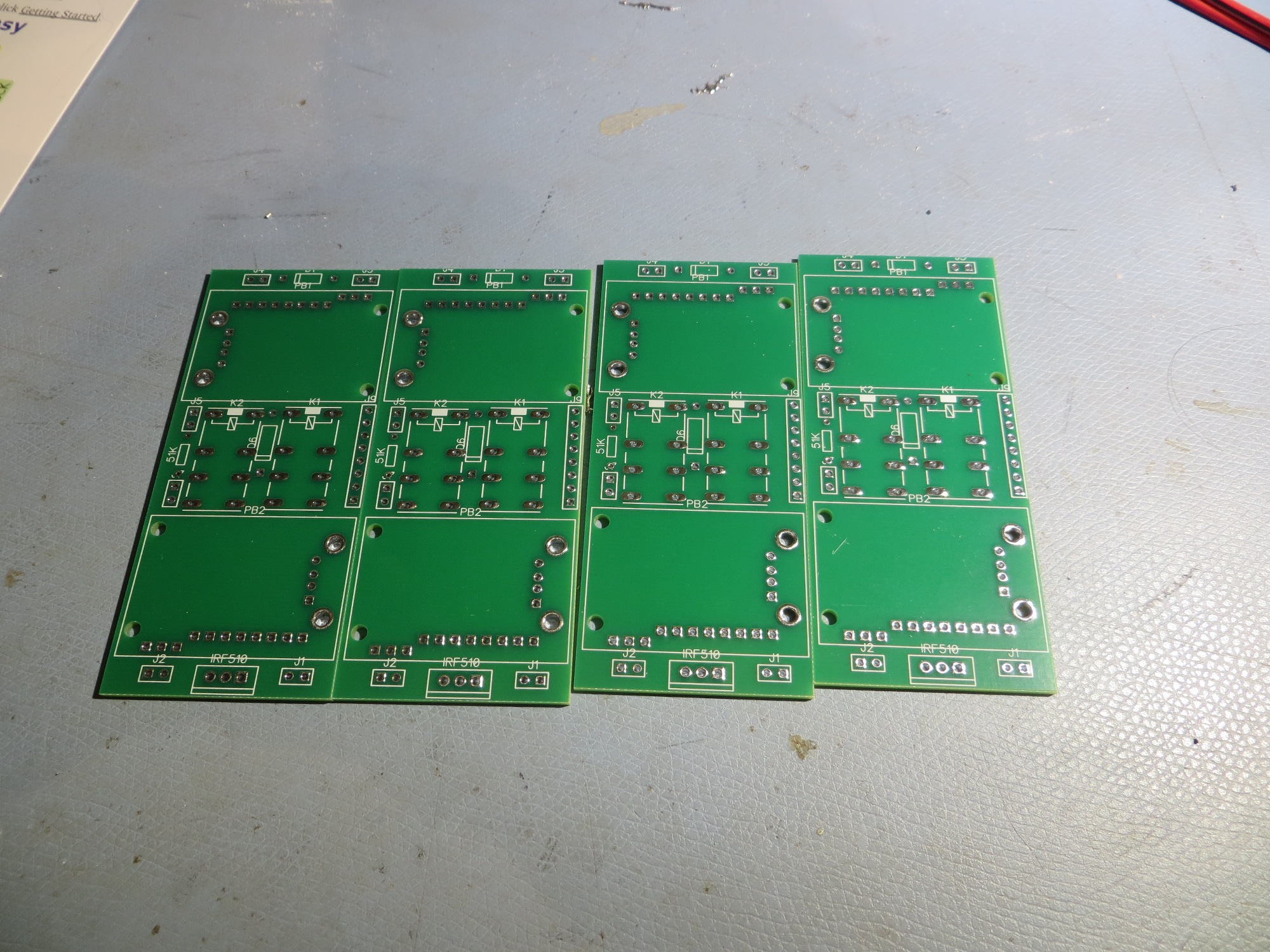
Four PCBs for the price of two – cool!
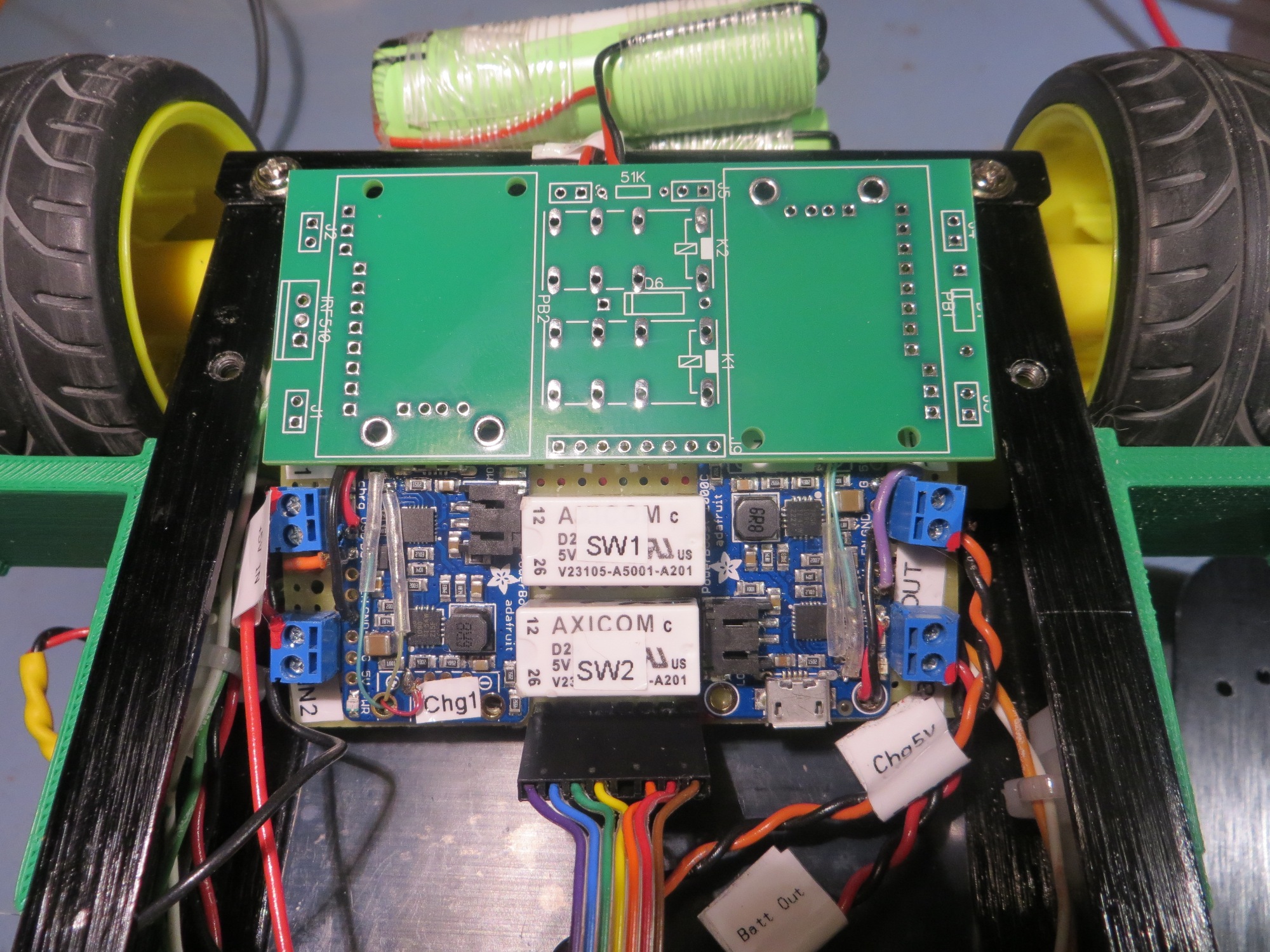
Test run to populate PCB with actual components
Size comparison between PCB and hand-wired versions. First iteration of PCB is slightly larger
After inspecting the PCBs, I realized I had screwed up on a couple of items. The pad pattern for the two-wire terminal blocks wasn’t correct (too small), and at least one of them was reversed – oops! In addition, a couple of PCB traces weren’t correct. So, it was back to the drawing board (literally) for a ‘version 2’ PCB. On this iteration I learned a good bit more about DipTrace’s schematic/component/pattern relationship, so I felt like I was getting at least some value out of my screwups. After removing a superfluous 2-wire terminal block and moving a couple of parts around, I was able to make the V2 PCB smaller than the original hand-wired model. This time I remembered to use DipTrace’s verification routines, and this allowed me to catch some additional problems that had made it through into V2. In addition, I used DipTrace’s print facility to print out a 1:1 PCB layout on paper, so I could double-check parts placement with real components, as shown in the following photo
Second iteration PCB printed at 1:1 scale on paper for component fit testing
So, many hours and a couple of iterations later, I have what I believe is a successful PCB implementation, and I sent off a new order to BAC. As usual, I wound up spending far more time designing the PCB than I ever would have in making a second hand-wired unit for the new robot, but where’s the fun in that?
Stay tuned
Frank