Posted Oct 26, 2016
As I was browsing among the aisles in my local MicroCenter store the other day, I ran across the OSEPP ‘IR Light Follower’, an Arduinio-compatible board featuring 6 IR photodiodes arrayed in a semicircle, as shown in the following screen grab.
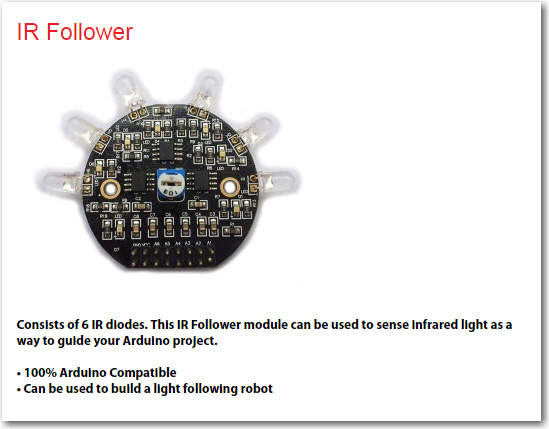
IR follower description from the OSEPP website
After a moment of thinking ‘what the heck would you do with this?’, it hit me – I might be able to use this device to get Wall-E2, my wall following robot, to home in on my planned charging station by placing an IR emitter on the station, pointed along a likely wall-following approach route. Then, when Wall-E2 detects the IR emitter, it could transition from wall-following to IR homing mode, and voila – capture by the charging station! So, I decided to buy one and give it a whirl.
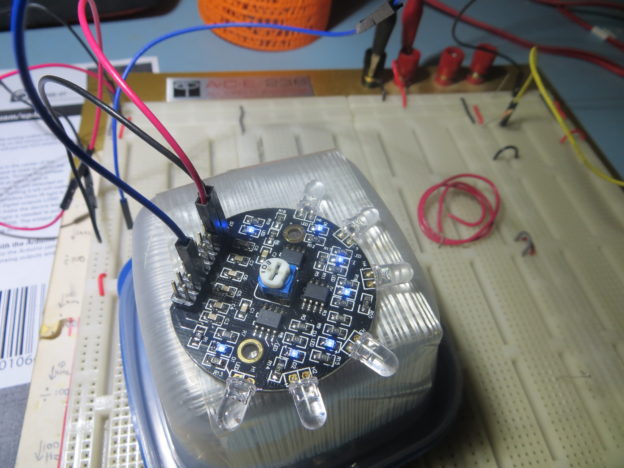
When I fired this guy up on my bench, I was surprised to find that ALL the small blue ‘IR detected’ LEDs lit up, as shown in the following photo
IR Follower on my bench. Note all the indicator LED’s are ON due to IR emissions from overhead LED lighting
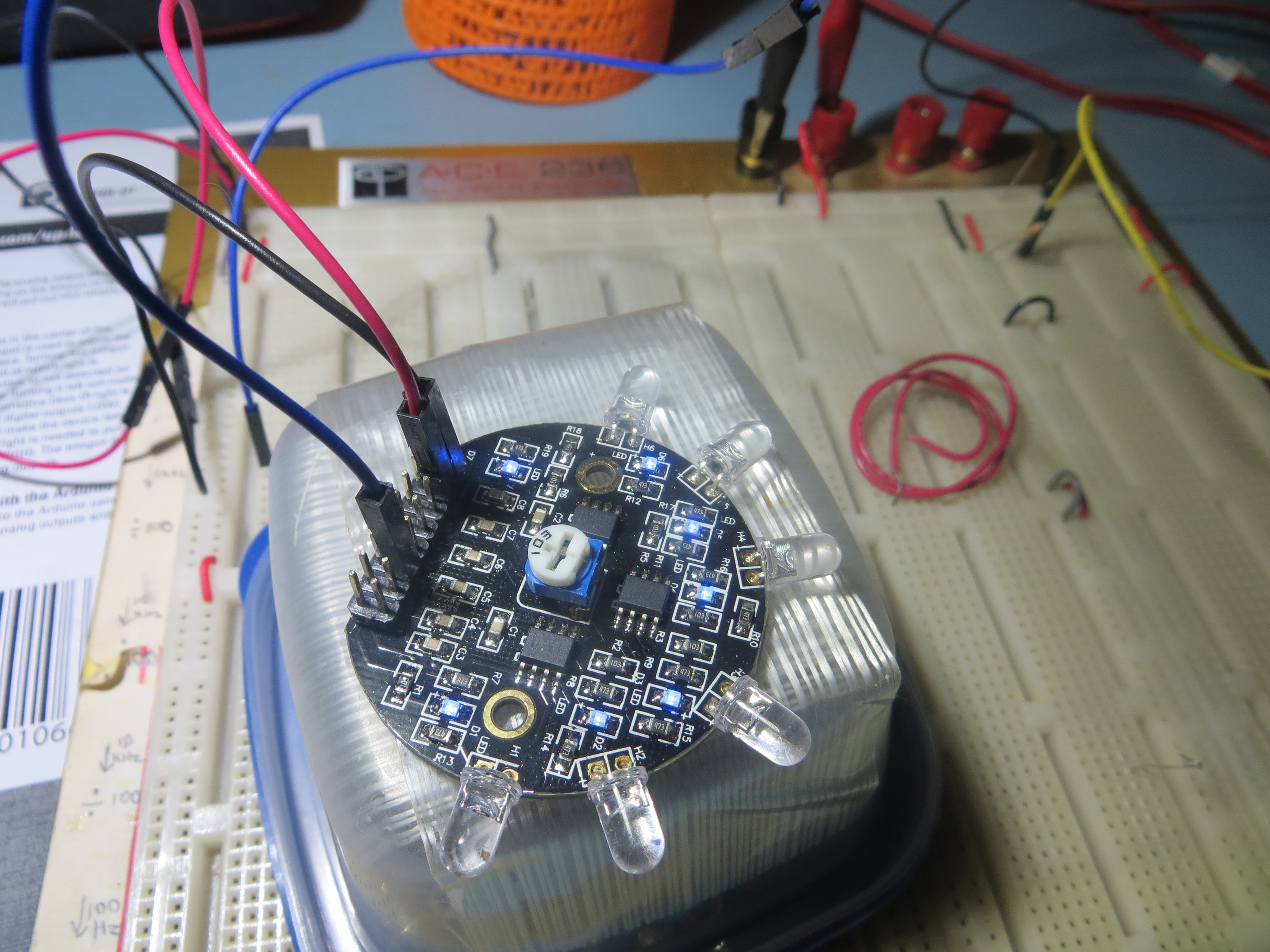
After a bit of head-scratching, I realized that the sensor board’s optics were being ‘flooded’ by my lab’s overhead LED track lighting (I had noticed this behavior on an earlier IR-related project, so it wasn’t too big of a leap). After turning the room lights off, and rigging up an IR emitter a few inches away, I got the following results

Had to turn off the lights to eliminate IR flooding. The blue LED at upper left is the power-on indicator. IR emitter is at far right
At first blush, these initial results are very encouraging. the board is obviously sensitive enough to detect the output from a single IR LED emitter at a distance of about 6″, and has what appears to be reasonable directivity, but that’s about all I know at the moment. I have no idea whether or not that will translate into sufficient tracking accuracy for charging station capture, but I do plan to find out!
The current idea is to mount the board on the front ‘shelf’ of the robot, as shown in the following photo
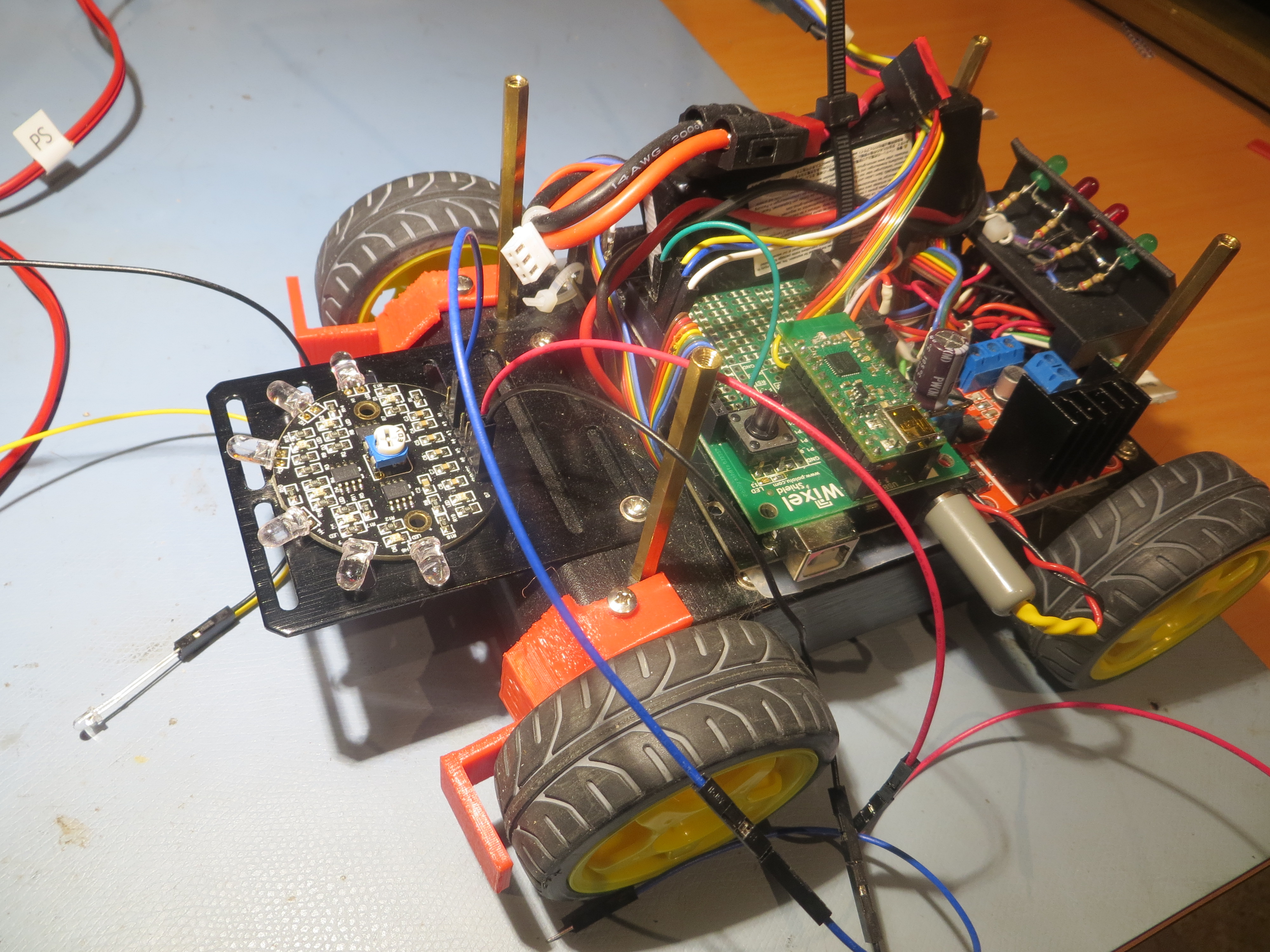
Planned location for the IR follower board. I’ll have to build a ‘sunshade’ to prevent IR flooding from overhead lights
Of course, I’ll have to build some sort of sunshade to keep the sensor from being flooded by overhead lighting, but that’s what 3D printers are for ;-).
Stay tuned,
Frank
Pingback: Charging Station System Integration – Part II - Paynter's Palace