Posted 15 August 2016
In my last post on this subject, I described a series of ‘field’ tests of the magnetometer on Wall-E2, my wall-following robot. These tests demonstrated that the magnetometer was operating properly, but heading results were unusable due to significant distortion of the magnetic field along the west (garage-side) wall of the entry hallway.
This post describes a similar test in an interior hallway. The interior hallway in our home is oriented orthogonally to the entry hallway, i.e. at 110/290 deg magnetic. The walls are about 1 m wide, and constructed of standard wooden stud and sheet rock construction. There are several rooms opening off this hallway, but all the entry doors were closed for this test.
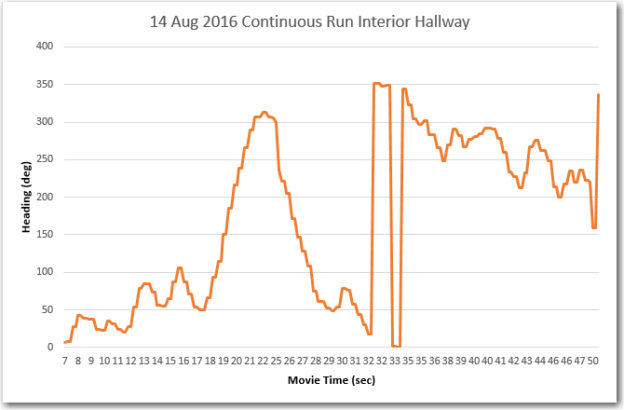
As shown in the movie and the associated Excel chart, the robot starts at the west end headed east, travels the length of the hallway, maneuvers around for a while, and finishes up headed west. During the first and last 10-15 seconds of the run, Wall-E2 is physically heading in a more or less constant direction (about 110 deg in the first part, about 290 deg in the last part).
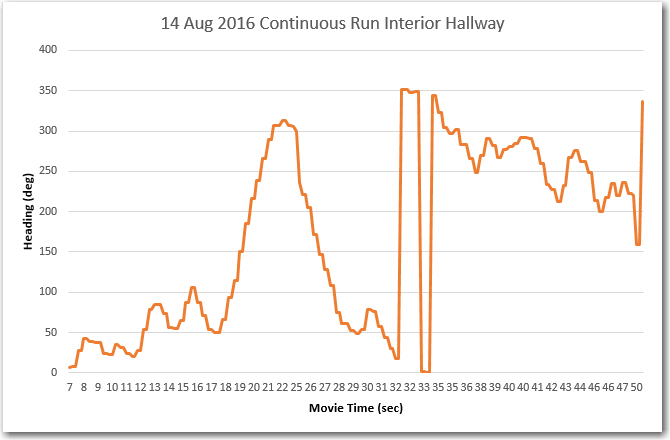
Wall-E2 heading results from interior hallway run
Unfortunately, the Excel chart shows a different story. During the first 15 seconds of the run, there is a definite linear change in the average heading, from about 25 deg to about 75 deg, even though the robot is physically tracking along a wall that is oriented at about 110/290 deg. During the last 15 seconds or so, the opposite happens; there is a linear downward trend from about 300 deg to about 225 deg. These trends are physically impossible, so the only possible explanation is that either the magnetometer readings are in error, or there is something in or near the interior hallway that is distorting the earth’s magnetic field enough to produce these results.
I had hoped that the interference noted in the previous post was due to the common wall with the garage and its associated metal structures, and that the interior hallway would be free of such problems, but apparently this is not the case. So, I’m now forced to consider other ideas for interior geo-location.
Stay tuned!
Frank
Pingback: Another try at heading information for Wall-E2 - Paynter's Palace