Posted 07/19/16
In my last post on this subject, I described moving my CK Devices ‘Mongoose’ IMU from a wooden stalk mounted on the 2nd deck to a more compact bracket mounted in the same location, and showed some data that indicated reasonable heading performance. This post describes some ‘field’ (a hallway in my home) test results using the bracket-mounted configuration.
Field Test Site:
My ‘field test’ site consists of two hallway sections in my home. The two sections are oriented about 45 degrees to each other, as shown in the following diagram.
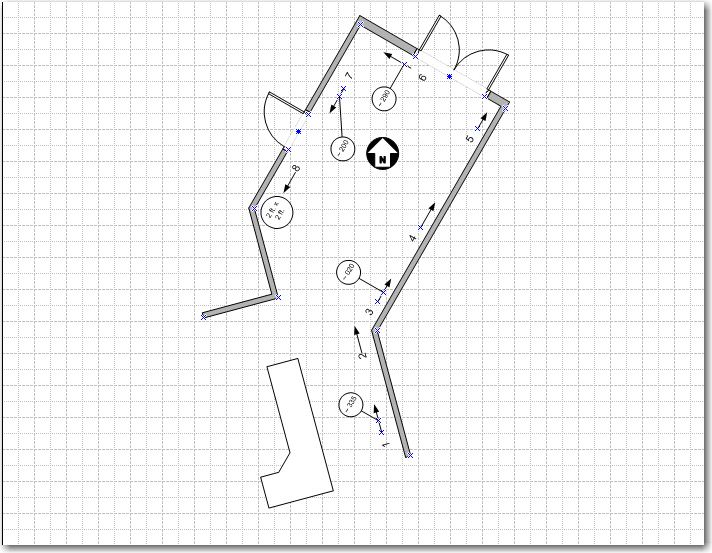
Field test area physical layout, oriented north-up
For my first ‘Field Test’, I simply set Wall-E2 loose at position 1, pointed in the direction shown in the diagram, and recorded via the wixel-pair wireless connection implemented last December. Wall-E2 successfully navigated (with a few ‘back-and-forth’ iterations) from point 1 to point 8 in the diagram, as shown in the following short video.
The captured telemetry data included the run time in seconds and the magnetic heading in degrees, and I sucked this information into Excel, where I graphed the mag heading versus time, as shown in the following screenshot.
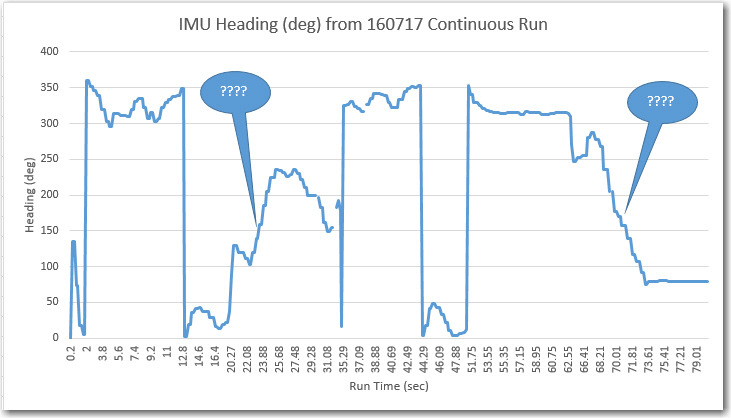
Heading vs Time for Wall-E2 continuous run. Areas of puzzlement marked by ‘????’
As the caption notes, most of the graph makes sense, but there are at least two different areas where there is a more-or-less linear change of heading versus time, where there shouldn’t be any (or at least, where I don’t *think* there should be any). Either Wall-E2 has some tricks up his sleeve that he wasn’t telling me about, or I don’t fully understand how the data and the physical record (the video) correspond.